This repository contains implementations of two path planning algorithms:
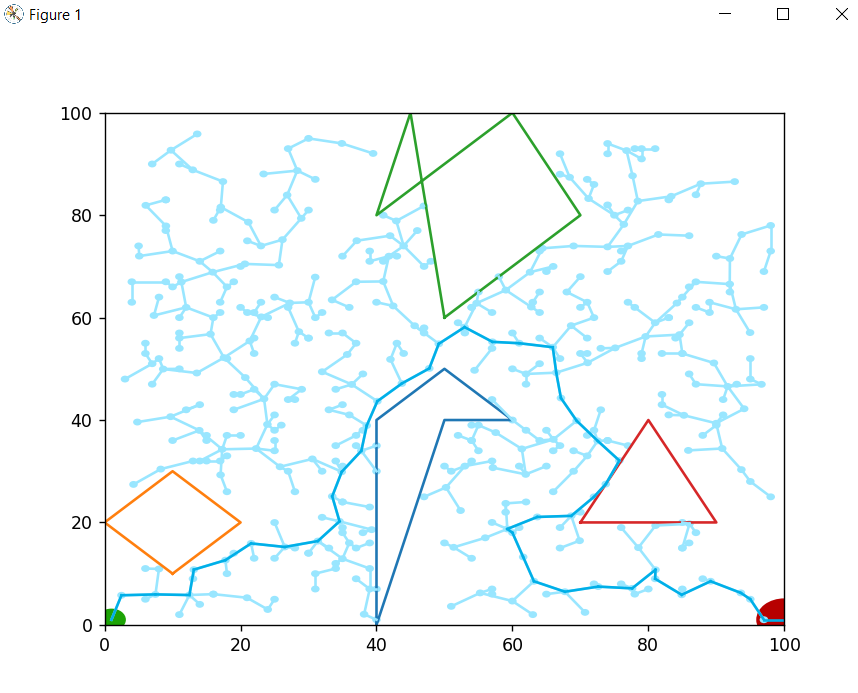
- RRT(Rapidly Exploring Random Trees)
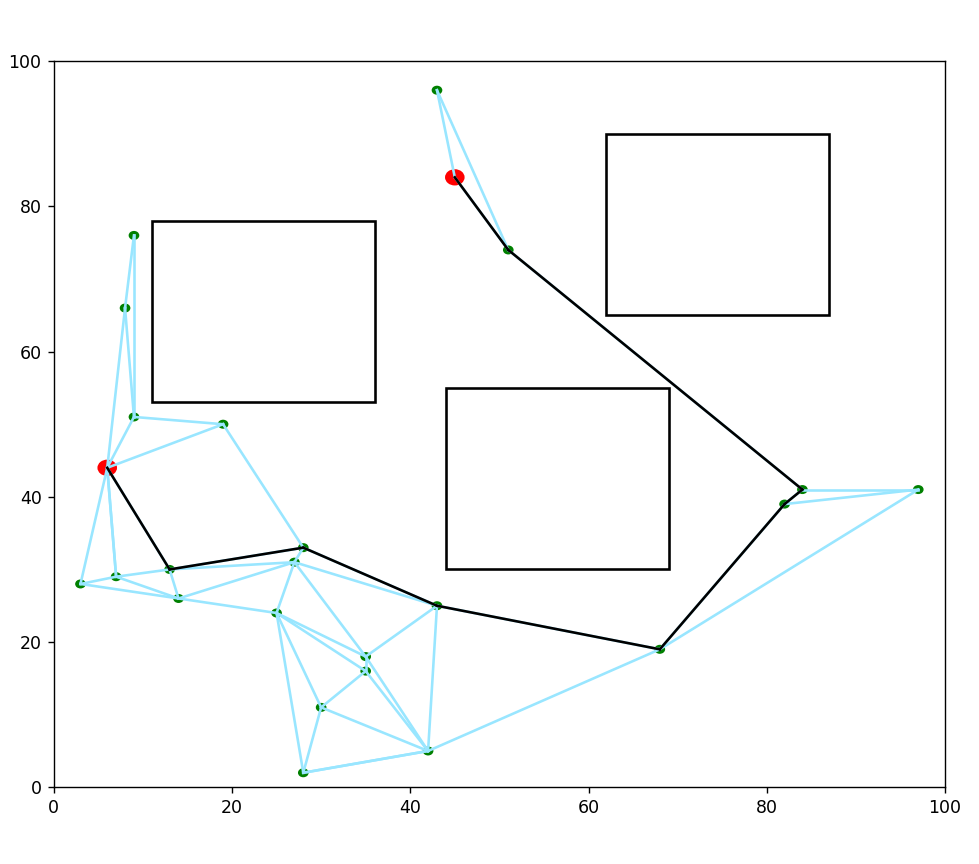
- A* with PRM
These implementations were made as part of the induction process for ERC
| Name | Name | Last commit date | ||
|---|---|---|---|---|
This repository contains implementations of two path planning algorithms:
These implementations were made as part of the induction process for ERC