Welcome to Pose2Sim
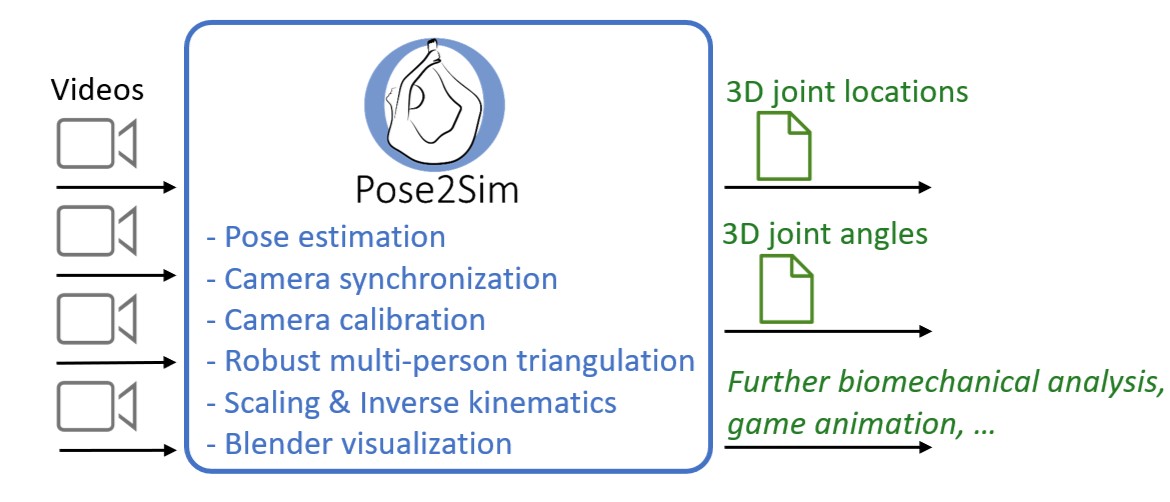
+Pose2Sim provides a workflow for 3D markerless kinematics, as an alternative to traditional marker-based motion capture methods.
+ + + + +
+  +
+ Other more or less challenging tasks and conditions
+Multiple Cameras
+Use phones, webcams, or GoPros - any combination works
+Research-Grade Accuracy
+Validated accuracy with low-cost hardware
+Multi-Person Support
+Track multiple people simultaneously
+Full 3D Kinematics
+Complete OpenSim skeletal analysis with joint angles
+⚠️ Important Note
+Please set undistort_points and handle_LR_swap to false for now since it currently leads to inaccuracies. This will be fixed soon.
🎬 Perfect For
+-
+
- Sports Analysis: Field-based 3D motion capture +
- Clinical Assessment: Gait analysis in doctor's office +
- Animation: Outdoor 3D capture with fully clothed subjects +
- Research: Biomechanics studies with multiple participants +
⚠️ Key Requirements
+-
+
- Multiple cameras: Minimum 2 cameras (4+ recommended) +
- Camera calibration: Cameras must be calibrated +
- Synchronization: Cameras should be synchronized (or sync in post) +
- Single camera? Use Sports2D for 2D analysis +
📦 Version History
+-
+
- v0.10 (09/2024): OpenSim integration in pipeline +
- v0.9 (07/2024): Integrated pose estimation +
- v0.8 (04/2024): New synchronization tool +
- v0.7 (03/2024): Multi-person analysis +
- v0.6 (02/2024): Marker augmentation & Blender visualizer +
- v0.5 (12/2023): Automatic batch processing +
✅ What You'll Learn
+This comprehensive guide will take you through:
+-
+
- Complete installation and setup +
- Running demos (single & multi-person) +
- Setting up your own projects +
- 2D pose estimation from videos +
- Camera calibration techniques +
- Multi-camera synchronization +
- 3D triangulation and filtering +
- OpenSim kinematic analysis +
- Performance optimization +
Complete Installation
+Full installation with OpenSim support for complete 3D kinematic analysis.
+ +1. Install Anaconda or Miniconda
+Anaconda creates isolated environments for different projects, preventing package conflicts and ensuring reproducibility.
+Download Miniconda (recommended - lightweight version)
+Once installed, open an Anaconda prompt and create a virtual environment:
+conda create -n Pose2Sim python=3.9 -y
+conda activate Pose2Sim
+ 2. Install OpenSim
+OpenSim provides biomechanical modeling toolkit for accurate skeletal analysis with physical constraints:
+conda install -c opensim-org opensim -y
+ Alternative methods: OpenSim documentation
+3. Install Pose2Sim
+ +Option A: Quick Install (Recommended)
+pip install pose2sim
+ Option B: Install from Source
+For developers who want the latest unreleased features:
+git clone --depth 1 https://github.com/perfanalytics/pose2sim.git
+cd pose2sim
+pip install .
+ 4. Optional: GPU Acceleration
+GPU support dramatically speeds up pose estimation (3-5x faster) but requires 6 GB additional disk space.
+ +Check GPU Compatibility:
+nvidia-smi
+ Note the CUDA version - this is the latest your driver supports
+Install PyTorch with CUDA:
+Visit PyTorch website and install compatible version. For example:
+pip3 install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu124
+ Adjust cu124 based on your CUDA version
+Install ONNX Runtime GPU:
+pip install onnxruntime-gpu
+ Verify Installation:
+python -c "import torch; import onnxruntime as ort; print(torch.cuda.is_available(), ort.get_available_providers())"
+ Should print: True ['CUDAExecutionProvider', ...]
+✅ Installation Complete!
+Pose2Sim is now ready. Remember to activate your environment before use:
+conda activate Pose2Sim
+ 💾 Storage Requirements
+-
+
- Minimal install: ~3 GB (without GPU, minimal models) +
- Standard install: ~4.75 GB (without GPU) +
- Full install with GPU: ~10.75 GB +
You can save 1.3 GB by uninstalling TensorFlow if you skip marker augmentation: pip uninstall tensorflow
Single Person Demo
+Test your installation with a demo of a person balancing on a beam, filmed with 4 calibrated cameras.
+ +1. Locate Demo Folder
+Find where Pose2Sim is installed:
+pip show pose2sim
+ Copy the location path and navigate to demo:
+cd <path>\Pose2Sim\Demo_SinglePerson
+ 2. Run Complete Workflow
+Launch Python and execute the full pipeline:
+ipython
+ from Pose2Sim import Pose2Sim
+
+Pose2Sim.calibration()
+Pose2Sim.poseEstimation()
+Pose2Sim.synchronization()
+Pose2Sim.personAssociation()
+Pose2Sim.triangulation()
+Pose2Sim.filtering()
+Pose2Sim.markerAugmentation()
+Pose2Sim.kinematics()
+ 💡 Quick Tip
+Run all steps at once with:
+Pose2Sim.runAll()
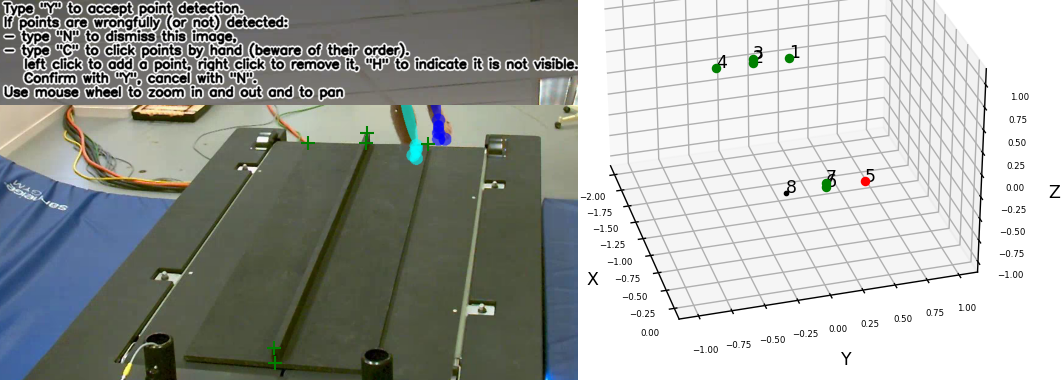
+ 3. Understanding the Synchronization GUI
+When the synchronization GUI appears, select a keypoint showing clear vertical motion for best results.
+The GUI helps you choose which keypoint to use for camera synchronization based on vertical speed.
+📁 Output Files Created
+-
+
- pose-3d/*.trc: 3D marker coordinates for each trial +
- kinematics/*.mot: 3D joint angles over time +
- kinematics/*.osim: Scaled OpenSim models +
- logs.txt: Processing details and statistics +
4. Visualize Results
+ +Option A: OpenSim GUI
+-
+
- Download OpenSim GUI +
- File → Open Model: Load scaled model from
kinematicsfolder
+ - File → Load Motion: Load .mot file from
kinematicsfolder
+ - File → Preview Experimental Data: Load .trc file to see 3D markers +
 +
+ Option B: Blender (More Visual)
+Install Pose2Sim_Blender add-on for beautiful 3D visualization with camera overlay and animation capabilities.
+⚙️ Configuration
+Default parameters are in Config.toml - all parameters are documented. Feel free to experiment!
📝 Important Notes
+-
+
- Marker Augmentation: Doesn't always improve results. +
- Save space: If you skip marker augmentation, uninstall tensorflow to save 1.3 GB:
pip uninstall tensorflow
+
Multi-Person Demo
+Discover how Pose2Sim tracks multiple people simultaneously - a hidden person appears when multi-person analysis is activated!
+ +1. Navigate to Multi-Person Demo
+cd <path>\Pose2Sim\Demo_MultiPerson
+ 2. Verify Configuration
+Ensure multi_person = true is set in your Config.toml file.
3. Run Multi-Person Workflow
+ipython
+ from Pose2Sim import Pose2Sim
+
+Pose2Sim.calibration()
+Pose2Sim.poseEstimation()
+Pose2Sim.synchronization()
+Pose2Sim.personAssociation()
+Pose2Sim.triangulation()
+Pose2Sim.filtering()
+Pose2Sim.markerAugmentation()
+Pose2Sim.kinematics()
+ Or simply:
+Pose2Sim.runAll()
+ 📊 Multi-Person Output
+Pose2Sim generates separate files for each detected person:
+-
+
- pose-3d/: One .trc file per participant +
- kinematics/: One scaled .osim model per participant +
- kinematics/: One .mot angle file per participant +
4. How Multi-Person Tracking Works
+Pose2Sim uses sophisticated algorithms to:
+-
+
- Associate persons across views: Matches people across different camera angles using epipolar geometry +
- Track over time: Maintains consistent IDs by analyzing movement speed and displacement +
- Handle occlusions: Robust to temporary occlusions or people entering/leaving frame +
⚠️ Important Configuration
+When using marker augmentation and kinematics with multiple people, ensure the order matches:
+-
+
markerAugmentation > participant_heightvalues
+ participant_massvalues
+
Must correspond to person IDs in the same order!
+# Example in Config.toml
+participant_height = [1.72, 1.65] # Person 0, Person 1
+participant_mass = [70, 65] # Person 0, Person 1
+ 💡 Visualization Tips
+Use Blender visualization (as explained in Step 2) to see both people simultaneously in 3D space with their respective skeletons!
+✅ Multi-Person Success!
+You've now mastered both single and multi-person analysis. Ready to process your own data!
+Batch Processing Demo
+Process multiple trials with different parameters efficiently using batch processing structure.
+ +1. Navigate to Batch Demo
+cd <path>\Pose2Sim\Demo_Batch
+ 2. Understanding Batch Structure
+Batch processing uses a hierarchical configuration system:
+BatchSession/
+├── Config.toml # Global parameters
+├── Calibration/
+├── Trial_1/
+│ ├── Config.toml # Trial-specific overrides
+│ └── videos/
+├── Trial_2/
+│ ├── Config.toml # Different parameters for this trial
+│ └── videos/
+└── Trial_3/
+ ├── Config.toml
+ └── videos/
+ 🔧 How It Works
+-
+
- Global Config: BatchSession/Config.toml sets defaults for all trials +
- Trial Overrides: Each Trial/Config.toml can override specific parameters +
- Inheritance: Uncommented keys in trial configs override global settings +
3. Run Batch Processing
+ipython
+ from Pose2Sim import Pose2Sim
+
+# Run from BatchSession folder to process all trials
+Pose2Sim.runAll()
+
+# Or run from specific Trial folder to process only that trial
+ 4. Experiment with Parameters
+Try modifying Trial_2/Config.toml:
Example: Different Time Range
+Uncomment and set in Trial_2/Config.toml:
+[project]
+frame_range = [10, 99] # Process only frames 10-99
+ Example: Lightweight Mode
+Uncomment and set in Trial_2/Config.toml:
+[pose]
+mode = 'lightweight' # Faster pose estimation
+ 📊 Batch Processing Benefits
+-
+
- Consistency: Same calibration and global settings across trials +
- Flexibility: Trial-specific customization when needed +
- Efficiency: Process entire sessions with one command +
- Experimentation: Compare different parameter sets easily +
✅ Batch Processing Mastered!
+You now understand how to efficiently process multiple trials with varying parameters. This structure scales from research studies to production pipelines!
+Setting Up Your Project
+Organize your own data for analysis using Pose2Sim's structured project format.
+ +1. Find Your Pose2Sim Installation
+pip show pose2sim
+ Note the location path and navigate to it:
+cd <path>\pose2sim
+ 2. Copy Template Folder
+Copy the appropriate demo folder as your project template:
+-
+
- Demo_SinglePerson: For single person analysis +
- Demo_MultiPerson: For multiple people +
- Demo_Batch: For batch processing multiple trials +
Copy it to your preferred location and rename as desired.
+3. Project Structure
+Your project should follow this structure:
+MyProject/
+├── Config.toml # Main configuration
+├── Calibration/
+│ ├── intrinsics/
+│ │ ├── cam01/ # Videos/images for intrinsic calibration
+│ │ ├── cam02/
+│ │ └── ...
+│ └── extrinsics/
+│ ├── cam01/ # Videos/images for extrinsic calibration
+│ ├── cam02/
+│ └── ...
+├── videos/
+│ ├── cam01.mp4 # Your capture videos
+│ ├── cam02.mp4
+│ └── ...
+├── pose/ # Created automatically - 2D poses
+├── pose-3d/ # Created automatically - 3D coordinates
+└── kinematics/ # Created automatically - OpenSim results
+ 4. Edit Configuration
+Open Config.toml and customize key parameters:
Project Settings:
+[project]
+project_dir = 'path/to/MyProject' # Absolute path to your project
+frame_range = [] # Empty for all frames, or [start, end]
+multi_person = false # true for multiple people
+ Participant Info:
+[markerAugmentation]
+participant_height = [1.72] # Height in meters
+participant_mass = [70] # Mass in kg
+ 5. Add Your Videos
+-
+
- Place all camera videos in the
videos/folder
+ - Name them clearly (e.g., cam01.mp4, cam02.mp4, etc.) +
- Ensure all videos capture the same action +
- Videos don't need to be perfectly synchronized (we'll sync in post) +
⚠️ Important Tips
+-
+
- Camera placement: Position cameras to minimize occlusions +
- Coverage: Ensure the capture volume is covered by at least 2 cameras at all times +
- Lighting: Consistent lighting helps pose estimation +
- Background: Uncluttered backgrounds improve accuracy +
✅ Project Ready!
+Your project is now set up. Continue to the next steps to calibrate cameras and process your data!
+2D Pose Estimation
+Detect 2D keypoints from your videos using RTMPose or other pose estimation models.
+ + + +
+ Run Pose Estimation
+Navigate to your project folder and run:
+ipython
+ from Pose2Sim import Pose2Sim
+Pose2Sim.poseEstimation()
+ This will process all videos in your videos/ folder and save 2D keypoints to pose/.
Pose Models Available
+Configure in Config.toml under [pose]:
| Model | +Best For | +Speed | +
|---|---|---|
body_with_feet |
+ General body tracking (default) | +Balanced | +
whole_body |
+ Body + hands + face | +Slower | +
whole_body_wrist |
+ Detailed wrist motion | +Slower | +
Performance Modes
+Choose speed vs accuracy trade-off:
+[pose]
+mode = 'balanced' # Options: 'lightweight', 'balanced', 'performance'
+ -
+
- lightweight: Fastest, slightly less accurate +
- balanced: Good speed/accuracy balance (default) +
- performance: Most accurate, slower +
Advanced: Custom Models
+Use any RTMLib-compatible model with custom dictionary syntax:
+mode = """{'det_class':'YOLOX',
+ 'det_model':'https://download.openmmlab.com/mmpose/.../yolox_m.zip',
+ 'det_input_size':[640, 640],
+ 'pose_class':'RTMPose',
+ 'pose_model':'https://download.openmmlab.com/mmpose/.../rtmpose-m.zip',
+ 'pose_input_size':[192,256]}"""
+ 💡 Other Pose Solutions
+-
+
- DeepLabCut: For custom-trained models (animals, specific points) +
- OpenPose: Legacy support (BODY_25B recommended if using) +
- AlphaPose: Alternative to OpenPose +
- BlazePose: Fast inference, single person only +
Detection Frequency Optimization
+Speed up pose estimation by detecting people less frequently:
+[pose]
+det_frequency = 4 # Detect people every 4 frames, track in between
+ Person detection is slow; tracking between frames is fast. This can provide 5x speedup! However, it might impact accuracy.
+📊 Output Format
+2D poses saved as JSON files in pose/ folder:
-
+
- One JSON file per frame per camera +
- Contains keypoint coordinates and confidence scores +
- OpenPose-compatible format +
✅ Pose Estimation Complete!
+Your 2D keypoints are ready. Next step: calibrate your cameras to enable 3D triangulation!
+Camera Calibration
+Calibrate your cameras to determine their intrinsic properties (lens characteristics) and extrinsic parameters (position and orientation in space).
+ + + +
+ Intrinsic calibration with checkerboard
+ +
+ Extrinsic calibration
+Run Calibration
+from Pose2Sim import Pose2Sim
+Pose2Sim.calibration()
+ Method 1: Convert Existing Calibration
+If you already have a calibration file from another system:
+ +Set in Config.toml:
+[calibration]
+calibration_type = 'convert'
+convert_from = 'qualisys' # Options: qualisys, optitrack, vicon, opencap,
+ # easymocap, biocv, caliscope, anipose, freemocap
+ | System | +File Format | +Notes | +
|---|---|---|
| Qualisys | +.qca.txt | +Export from QTM | +
| Vicon | +.xcp | +Direct copy | +
| OpenCap | +.pickle | +Multiple files | +
| Caliscope | +.toml | +Native format | +
Method 2: Calculate from Scratch
+Calculate calibration using checkerboard or scene measurements.
+ +Set in Config.toml:
+[calibration]
+calibration_type = 'calculate'
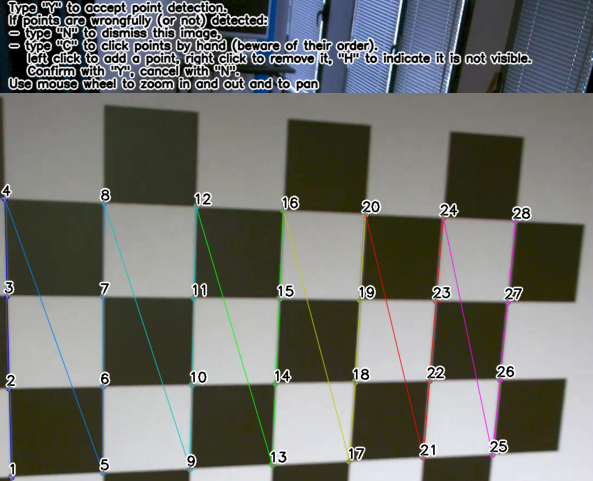
+ Step 1: Intrinsic Calibration
+Intrinsic parameters are camera-specific properties (focal length, distortion) - usually only need to calculate once per camera.
+ +-
+
- Create folder for each camera in
Calibration/intrinsics/
+ - Film a checkerboard with each camera (board OR camera can move) +
- Configure checkerboard parameters in Config.toml:
+ ++
[calibration.intrinsics] +overwrite_intrinsics = true +show_detection_intrinsics = true +intrinsics_corners_nb = [9, 6] # Internal corners (one less than visible) +intrinsics_square_size = 60 # Square size in mm+
+
📋 Checkerboard Requirements
+-
+
- Flat: Board must be completely flat +
- Asymmetric: Rows ≠ Columns (or rows odd if columns even) +
- Border: Wide white border around pattern +
- Focus: Sharp, in-focus images +
- Coverage: Film from multiple angles covering most of frame +
- No glare: Avoid reflections +
Generate checkerboard at calib.io
+✅ Target Error
+Intrinsic calibration error should be below 0.5 pixels
+Step 2: Extrinsic Calibration
+Extrinsic parameters are camera positions and orientations in space - must recalculate whenever cameras move.
+ +-
+
- Create folder for each camera in
Calibration/extrinsics/
+ - Film either:
+
-
+
- Checkerboard: Place on ground, visible to all cameras +
- Scene measurements: Measure 10+ point coordinates in 3D space +
+ - Configure in Config.toml:
+ ++
[calibration.extrinsics] +extrinsics_method = 'board' # or 'scene' +show_detection_extrinsics = true +extrinsics_corners_nb = [10, 7] +extrinsics_square_size = 60 + +# If using 'scene' method: +# object_coords_3d = [[0,0,0], [1,0,0], ...] # Measured 3D coordinates+
+
💡 Scene Measurement Tips
+-
+
- Use tiles, wall lines, boxes, or treadmill dimensions +
- Spread points throughout capture volume +
- More points = better accuracy +
- Can temporarily add then remove objects for calibration +
✅ Target Error
+Extrinsic calibration error should be below 1 cm (acceptable up to 2.5 cm depending on application)
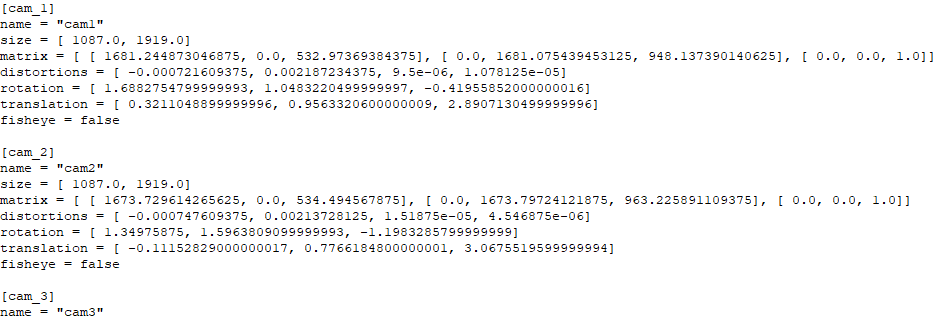
+Output: Calibration File
+Calibration creates Calib.toml in your Calibration folder containing:
-
+
- Camera matrix (intrinsics) for each camera +
- Distortion coefficients +
- Rotation and translation (extrinsics) +
- Calibration errors +
 +
+ ✅ Calibration Complete!
+Your cameras are now calibrated and ready for 3D triangulation!
+Camera Synchronization
+Synchronize your cameras by finding optimal time offset based on keypoint movement correlation.
+ + + +
+ ⚠️ Skip This Step If...
+Your cameras are natively synchronized (hardware sync, genlock, or timecode).
+Run Synchronization
+from Pose2Sim import Pose2Sim
+Pose2Sim.synchronization()
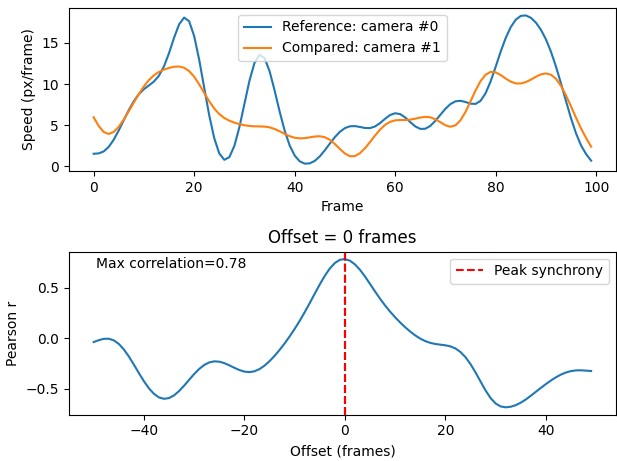
+ How It Works
+The algorithm:
+-
+
- Computes vertical speed of chosen keypoint(s) in each camera +
- Finds time offset that maximizes correlation between cameras +
- Applies offset to align all cameras to reference camera +
Synchronization GUI
+Enable interactive GUI for better control:
+[synchronization]
+synchronization_gui = true
+ The GUI allows you to:
+-
+
- Select which keypoint to use (e.g., RWrist, LAnkle) +
- Choose reference person (in multi-person scenes) +
- Adjust time window for analysis +
- Visualize correlation plots +
Configuration Options
+[synchronization]
+reset_sync = false # Start from scratch or refine existing
+frames_range = [] # Limit analysis to specific frames
+display_corr = true # Show correlation plots
+keypoints_to_consider = ['RWrist', 'LWrist'] # Keypoints for sync
+approx_time_maxspeed = 'auto' # Or specify time of max speed
+ 📊 Best Results When...
+-
+
- Person performs clear vertical movement (jump, wave, etc.) +
- Capture lasts 5+ seconds (enough data) + +
Alternative Sync Methods (Not included in Pose2Sim)
+If keypoint-based sync doesn't work well:
+ +Manual Sync Markers:
+-
+
- Flashlight: Flash visible to all cameras +
- Clap: Sync with audio (if available) +
- Clear event: Ball drop, jump, etc. +
Hardware Solutions:
+-
+
- GoPro timecode: Built-in sync feature +
- GPS sync: For outdoor captures (GoPro) +
- GoPro app: Sync via app (slightly less reliable) +
✅ Cameras Synchronized!
+Your videos are now time-aligned and ready for multi-view triangulation!
+Person Association
+Associate the same person across different camera views and track them over time.
+ +⚠️ Skip This Step If...
+Only one person is visible in your capture.
+Run Person Association
+from Pose2Sim import Pose2Sim
+Pose2Sim.personAssociation()
+ How It Works
+ +Single Person Mode (multi_person = false):
+Automatically selects the person with smallest reprojection error (best 3D reconstruction).
+Multi-Person Mode (multi_person = true):
+-
+
- Cross-view association: Uses epipolar geometry to match people across camera views +
- Temporal tracking: Tracks people across frames using displacement speed +
- Consistent IDs: Maintains identity even with brief occlusions +
Association Method
+The algorithm finds the best person associations by:
+-
+
- Triangulating all possible person combinations +
- Reprojecting 3D points back to image planes +
- Computing epipolar line distances +
- Choosing combination with minimum geometric error +
Configuration Parameters
+[personAssociation]
+likelihood_threshold_association = 0.3
+reproj_error_threshold_association = 20 # pixels
+min_cameras_for_triangulation = 2
+ 💡 Parameter Tuning
+-
+
- Increase thresholds if people are frequently lost +
- Decrease thresholds if wrong person associations occur +
- Monitor console output for association success rates +
Handling Occlusions
+Pose2Sim is robust to:
+-
+
- Temporary loss of person in some camera views +
- People entering/leaving the capture volume +
- Brief full occlusions (person behind object) +
If reprojection error is too high, cameras are progressively removed until threshold is met.
+📊 Check Results
+Review console output showing:
+-
+
- Number of people detected per frame +
- Association success rate +
- Average reprojection errors +
- Cameras excluded per frame +
If results aren't satisfying, adjust constraints in Config.toml.
+✅ Person Association Complete!
+People are now correctly identified across views and time. Ready for 3D triangulation!
+3D Triangulation
+Convert 2D keypoints from multiple views into robust 3D coordinates using weighted triangulation.
+ +Run Triangulation
+from Pose2Sim import Pose2Sim
+Pose2Sim.triangulation()
+ How It Works
+Robust triangulation process:
+-
+
- Weighted triangulation: Each 2D point weighted by detection confidence +
- Likelihood filtering: Only points above confidence threshold used +
- Reprojection check: Verify 3D point quality by reprojecting to cameras +
- Error-based refinement:
+
-
+
- If error high: swap left/right sides and retry +
- Still high: progressively remove cameras until error acceptable +
- Too few cameras: skip frame, interpolate later +
+ - Interpolation: Fill missing values with cubic spline interpolation(default, can be changed) +
Configuration Parameters
+[triangulation]
+reproj_error_threshold_triangulation = 15 # pixels
+likelihood_threshold_triangulation = 0.3
+min_cameras_for_triangulation = 2
+interpolation_kind = 'cubic' # cubic, linear, slinear, quadratic
+interp_if_gap_smaller_than = 10 # frames
+show_interp_indices = true # Show which frames were interpolated
+handle_LR_swap = false # KEEP FALSE - Correct left/right swaps (buggy)
+undistort_points = false # KEEP FALSE - Undistort before triangulation (buggy)
+make_c3d = false # Also save as .c3d format
+ 📊 Output Information
+Triangulation provides detailed statistics:
+-
+
- Mean reprojection error per keypoint (mm and px) +
- Cameras excluded on average per keypoint +
- Frames interpolated for each keypoint +
- Least reliable cameras identification +
Visualize Results
+Check your .trc file in OpenSim:
+# In OpenSim GUI:
+File → Preview Experimental Data → Open .trc file
+ Look for smooth, realistic trajectories. Jumps or jitter indicate issues.
+Troubleshooting
+| Issue | +Solution | +
|---|---|
| High reprojection errors | +Increase reproj_error_threshold_triangulation |
+
| Missing keypoints | +Decrease likelihood_threshold_triangulation |
+
| Jittery motion | +Increase min_cameras_for_triangulation |
+
| Left/right swaps | +Keep handle_LR_swap = false (currently buggy) |
+
⚠️ Important Notes
+-
+
- Undistortion: Currently causes inaccuracies, keep
undistort_points = false
+ - LR Swap: Currently causes issues, keep
handle_LR_swap = false
+ - Interpolation limit: Large gaps (>10 frames) won't be interpolated by default +
- Quality check: Always visualize .trc in OpenSim before proceeding +
✅ Triangulation Complete!
+Your 3D coordinates are ready! Next step: filter the data for smoother motion.
+3D Filtering
+Smooth your 3D coordinates to remove noise while preserving natural motion characteristics.
+ + + +
+ Run Filtering
+from Pose2Sim import Pose2Sim
+Pose2Sim.filtering()
+ Filtered .trc files are saved with _filt suffix.
Available Filter Types
+[filtering]
+type = 'butterworth' # Choose filter type
+ | Filter | +Best For | +Key Parameters | +
|---|---|---|
butterworth |
+ General motion (default) | +order, cut_off_frequency | +
kalman |
+ Noisy data with gaps | +trust_ratio, smooth | +
butterworth_on_speed |
+ Preserve sharp movements | +order, cut_off_frequency | +
gaussian |
+ Simple smoothing | +sigma_kernel | +
loess |
+ Local polynomial smoothing | +nb_values_used | +
median |
+ Remove outliers | +kernel_size | +
Butterworth Filter (Recommended)
+Most commonly used for motion capture data:
+[filtering]
+type = 'butterworth'
+butterworth_order = 4 # Filter order (2-4 typical)
+butterworth_cut_off_frequency = 6 # Hz - adjust based on motion speed
+ 💡 Cutoff Frequency Guide
+-
+
- 3-6 Hz: Walking, slow movements +
- 6-10 Hz: Running, moderate speed +
- 10-15 Hz: Fast movements, sports +
- 15+ Hz: Very fast, impulsive motions +
Kalman Filter
+Excellent for noisy data with missing values:
+[filtering]
+type = 'kalman'
+kalman_trust_ratio = 500 # Measurement trust vs process model
+kalman_smooth = true # Apply smoothing pass
+ Higher trust_ratio = trust measurements more; lower = trust motion model more
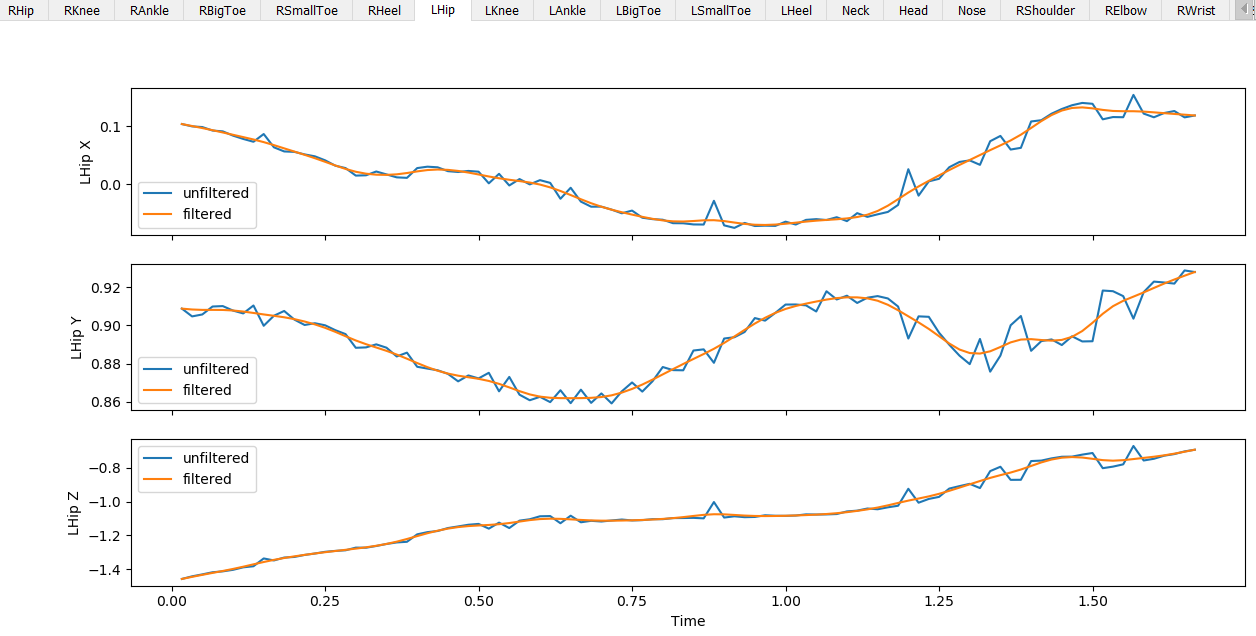
+Display Results
+Enable visualization to compare before/after filtering:
+[filtering]
+display_figures = true # Show plots comparing raw vs filtered
+ Plots show each keypoint's trajectory in X, Y, Z coordinates.
+Evaluate Filter Quality
+-
+
- Visual inspection: Check plots for smooth but realistic motion +
- OpenSim preview: Load filtered .trc in OpenSim
+ ++
File → Preview Experimental Data+
+ - Motion validation: Ensure filter doesn't remove real motion features +
⚠️ Filtering Cautions
+-
+
- Over-filtering: Too aggressive = removes real motion details +
- Under-filtering: Insufficient smoothing = noise remains +
- Cutoff frequency: Adjust based on motion speed - no one-size-fits-all +
- Can skip: Filtering is optional if data quality is already good +
✅ Filtering Complete!
+Your 3D data is now smoothed and ready for marker augmentation or kinematics!
+Marker Augmentation (Optional)
+Use Stanford's LSTM model to estimate 47 virtual marker positions, potentially improving inverse kinematics results.
+ +⚠️ Important: Not Always Better
+Marker augmentation doesn't necessarily improve results It's most beneficial when using fewer than 4 cameras.
+Recommendation: Run IK with and without augmentation, compare results.
+Run Marker Augmentation
+from Pose2Sim import Pose2Sim
+Pose2Sim.markerAugmentation()
+ Creates augmented .trc files with _LSTM suffix.
How It Works
+LSTM neural network trained on marker-based motion capture data:
+-
+
- Takes your detected keypoints as input +
- Predicts positions of 47 virtual markers +
- Outputs more stable but potentially less accurate motion +
Trade-off: More stability vs less precision
+Configuration Requirements
+[markerAugmentation]
+participant_height = [1.72] # Required - height in meters
+participant_mass = [70] # Optional - mass in kg (for kinetics only)
+make_c3d = false # Also save as .c3d format
+ ⚠️ Multi-Person Projects
+Order must match person IDs:
+participant_height = [1.72, 1.65, 1.80] # Person 0, 1, 2
+participant_mass = [70, 65, 85] # Same order!
+ Required Keypoints
+Marker augmentation requires these minimum keypoints (e.g., COCO won't work):
+["Neck", "RShoulder", "LShoulder", "RHip", "LHip", "RKnee", "LKnee",
+ "RAnkle", "LAnkle", "RHeel", "LHeel", "RSmallToe", "LSmallToe",
+ "RBigToe", "LBigToe", "RElbow", "LElbow", "RWrist", "LWrist"]
+ Limitations
+-
+
- No NaN values: Interpolation must fill all gaps before augmentation +
- Standing pose required: Model trained on standing/walking motions +
- Not suitable for: Sitting, crouching, lying down poses +
- Disk space: Requires TensorFlow (~1.3 GB) +
💾 Save Disk Space
+If you skip marker augmentation, uninstall TensorFlow:
+pip uninstall tensorflow
+ Saves ~1.3 GB of storage.
+When to Use
+| Use When | +Skip When | +
|---|---|
| Using 2-3 cameras | +Using 4+ cameras | +
| Noisy keypoint detection | +Clean keypoint detection | +
| Standing/walking motions | +Sitting/crouching/lying | +
| Need more stability | +Need maximum precision | +
✅ Decision Point
+You now have both regular and augmented .trc files. Compare both in the next step (Kinematics) to see which works better for your data!
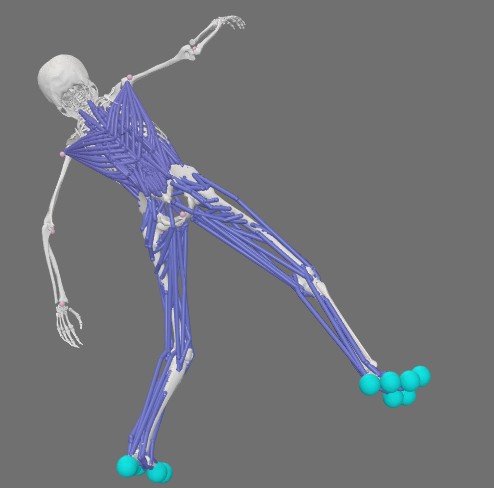
+OpenSim Kinematics
+Scale an OpenSim skeletal model to your participant and compute biomechanically accurate 3D joint angles using inverse kinematics.
+ +Run Kinematics
+from Pose2Sim import Pose2Sim
+Pose2Sim.kinematics()
+ Automatic vs Manual
+ +Automatic (Recommended - Fully Integrated)
+Pose2Sim performs scaling and IK automatically with no static trial needed:
+-
+
- Intelligent scaling: Uses frames where person is standing upright +
- Outlier removal: Removes fastest 10%, stationary frames, crouching frames +
- Robust averaging: Mean of best segment measurements +
- Automatic IK: Runs inverse kinematics on all frames +
Manual (OpenSim GUI)
+For specific trials or fine-tuned control, use OpenSim GUI:
+-
+
- Open OpenSim GUI +
- Load model from
Pose2Sim/OpenSim_Setup/
+ - Tools → Scale Model → Load scaling setup .xml +
- Tools → Inverse Kinematics → Load IK setup .xml +
- Run and save results +
Configuration Options
+[opensim]
+use_augmentation = false # Use LSTM-augmented markers or not
+use_contacts_muscles = false # Include muscles and contact spheres
+right_left_symmetry = true # Enforce bilateral symmetry
+remove_scaling_setup = false # Keep scaling files for inspection
+remove_ik_setup = false # Keep IK files for inspection
+
+# Model selection
+use_simple_model = false # Simple model (10x faster, stiff spine)
+
+# Participant info
+participant_height = [1.72] # meters - must match marker augmentation
+participant_mass = [70] # kg - affects kinetics, not kinematics
+ Simple vs Full Model
+| Feature | +Simple Model | +Full Model | +
|---|---|---|
| Speed | +~0.7s per trial | +~9s per trial | +
| Spine | +Stiff/rigid | +Flexible | +
| Shoulders | +Ball joint | +Anatomical constraints | +
| Muscles | +None | +Full muscle set | +
| Best For | +Gait, running, basic motion | +Complex motion, research | +
Scaling Strategy
+Pose2Sim intelligently selects frames for scaling by removing:
+-
+
- 10% fastest frames: Potential detection outliers +
- Zero-speed frames: Person likely out of frame +
- Crouching frames: Hip/knee flexion > 45° (less accurate) +
- 20% extreme values: After above filtering +
Remaining frames averaged for robust segment lengths.
+ +# Adjust these in Config.toml if needed
+[opensim.scaling]
+fastest_frames_to_remove_percent = 10
+large_hip_knee_angles = 45
+trimmed_extrema_percent = 20
+ Output Files
+Created in kinematics/ folder:
-
+
- *_scaled.osim: Scaled OpenSim model for each person +
- *.mot: Joint angles over time (open with Excel or OpenSim) +
- *_scaling.xml: Scaling setup (if not removed) +
- *_ik.xml: IK setup (if not removed) +
Visualize Results
+In OpenSim GUI:
+-
+
- File → Open Model: Load *_scaled.osim +
- File → Load Motion: Load *.mot file +
- Play animation to verify realistic motion +
Or use Blender add-on for better visualization!
+⚠️ When Automatic Scaling May Fail
+Automatic scaling works best for standing/walking. Use manual scaling for:
+-
+
- Mostly sitting or crouching trials +
- Unusual body positions throughout +
- Extreme motions (gymnastics, dancing) +
In these cases, capture a separate standing trial for scaling.
+🚀 Further Analysis
+With scaled model and joint angles, you can proceed to:
+-
+
- Inverse Dynamics: Compute joint torques +
- Muscle Analysis: Estimate muscle forces +
- Moco: Trajectory optimization and prediction +
- Ground Reaction Forces: With contact spheres +
✅ Kinematics Complete!
+You now have biomechanically accurate 3D joint angles! Your complete 3D motion capture workflow is finished!
+All Parameters Reference
+Complete reference of all configuration parameters in Config.toml.
+ +📁 Project Settings
+| Parameter | +Description | +Default | +
|---|---|---|
project_dir |
+ Absolute path to project folder | +current directory | +
frame_range |
+ [start, end] or [] for all | +[] | +
frame_rate |
+ Video frame rate (auto-detected) | +auto | +
multi_person |
+ Track multiple people | +false | +
🎯 Pose Estimation
+| Parameter | +Description | +Default | +
|---|---|---|
pose_model |
+ body_with_feet, whole_body, whole_body_wrist, CUSTOM | +body_with_feet | +
mode |
+ lightweight, balanced, performance (or custom dict) | +balanced | +
det_frequency |
+ Run person detection every N frames | +1 | +
tracking_mode |
+ sports2d, deepsort, none | +sports2d | +
display_detection |
+ Show real-time detection | +true | +
save_video |
+ 'to_video', 'to_images', 'none' | +to_video | +
output_format |
+ openpose, mmpose, deeplabcut | +openpose | +
📐 Calibration
+| Parameter | +Description | +Default | +
|---|---|---|
calibration_type |
+ convert, calculate | +convert | +
convert_from |
+ qualisys, optitrack, vicon, opencap, etc. | +qualisys | +
binning_factor |
+ For Qualisys if filming in 540p | +1 | +
Intrinsic Calibration
+| Parameter | +Description | +Default | +
|---|---|---|
overwrite_intrinsics |
+ Recalculate or use existing | +false | +
intrinsics_corners_nb |
+ [rows, cols] internal corners | +[9, 6] | +
intrinsics_square_size |
+ Square size in mm | +60 | +
show_detection_intrinsics |
+ Display corner detection | +true | +
Extrinsic Calibration
+| Parameter | +Description | +Default | +
|---|---|---|
extrinsics_method |
+ board, scene, keypoints | +board | +
extrinsics_corners_nb |
+ [rows, cols] for board method | +[10, 7] | +
extrinsics_square_size |
+ Square size in mm | +60 | +
show_detection_extrinsics |
+ Display detection/points | +true | +
object_coords_3d |
+ For scene method: measured points | +[] | +
🔄 Synchronization
+| Parameter | +Description | +Default | +
|---|---|---|
synchronization_gui |
+ Use interactive GUI | +true | +
reset_sync |
+ Start fresh or refine existing | +false | +
frames_range |
+ [start, end] for sync analysis | +[] | +
display_corr |
+ Show correlation plots | +true | +
keypoints_to_consider |
+ List of keypoints for sync | +['RWrist'] | +
approx_time_maxspeed |
+ Time of max speed or 'auto' | +auto | +
👥 Person Association
+| Parameter | +Description | +Default | +
|---|---|---|
likelihood_threshold_association |
+ Min confidence for association | +0.3 | +
reproj_error_threshold_association |
+ Max reprojection error (pixels) | +20 | +
min_cameras_for_triangulation |
+ Minimum cameras needed | +2 | +
📐 Triangulation
+| Parameter | +Description | +Default | +
|---|---|---|
reproj_error_threshold_triangulation |
+ Max reprojection error (pixels) | +15 | +
likelihood_threshold_triangulation |
+ Min keypoint confidence | +0.3 | +
min_cameras_for_triangulation |
+ Minimum cameras required | +2 | +
interpolation_kind |
+ cubic, linear, slinear, quadratic | +cubic | +
interp_if_gap_smaller_than |
+ Max gap size for interpolation (frames) | +10 | +
show_interp_indices |
+ Display interpolated frames | +true | +
handle_LR_swap |
+ Correct left/right swaps (KEEP FALSE) | +false | +
undistort_points |
+ Undistort before triangulation (KEEP FALSE) | +false | +
make_c3d |
+ Also save as .c3d format | +false | +
🔄 Filtering
+| Parameter | +Description | +Default | +
|---|---|---|
type |
+ butterworth, kalman, gaussian, loess, median | +butterworth | +
display_figures |
+ Show before/after plots | +true | +
butterworth_order |
+ Filter order | +4 | +
butterworth_cut_off_frequency |
+ Cutoff frequency (Hz) | +6 | +
kalman_trust_ratio |
+ Measurement vs process trust | +500 | +
kalman_smooth |
+ Apply smoothing pass | +true | +
gaussian_sigma_kernel |
+ Gaussian kernel size | +5 | +
loess_nb_values_used |
+ Number of values for LOESS | +30 | +
median_kernel_size |
+ Median filter kernel | +5 | +
🎯 Marker Augmentation
+| Parameter | +Description | +Default | +
|---|---|---|
participant_height |
+ Height in meters (list for multi-person) | +[1.72] | +
participant_mass |
+ Mass in kg (list for multi-person) | +[70] | +
make_c3d |
+ Save as .c3d format | +false | +
🤸 OpenSim Kinematics
+| Parameter | +Description | +Default | +
|---|---|---|
use_augmentation |
+ Use LSTM-augmented markers | +false | +
use_simple_model |
+ Simple model (10x faster) | +false | +
use_contacts_muscles |
+ Include muscles and contact spheres | +false | +
right_left_symmetry |
+ Enforce bilateral symmetry | +true | +
remove_scaling_setup |
+ Delete scaling .xml after | +false | +
remove_ik_setup |
+ Delete IK .xml after | +false | +
📖 Full Documentation
+For complete details and examples, see the Pose2Sim GitHub repository.
+Performance Optimization
+Speed up processing for large projects and batch operations.
+ +1. Calibration - Run Once
+If cameras don't move between sessions:
+-
+
- Run
Pose2Sim.calibration()only once
+ - Copy
Calib.tomlto new project folders
+ - Skip calibration step entirely +
💡 Time Saved
+Calibration can take 5-15 minutes. Reusing saves this every session!
+2. Pose Estimation Optimization
+ +Use GPU (Biggest Speedup)
+GPU acceleration provides 3-10x speedup. See Step 1 for installation.
+⚡ Speed Comparison
+Processing 4 camera videos (500 frames each):
+-
+
- CPU: ~150 seconds +
- GPU: ~30 seconds +
Reduce Detection Frequency
+Huge speedup with minimal accuracy loss:
+[pose]
+det_frequency = 100 # Detect people every 100 frames instead of every frame
+ Result: 150s → 30s (5x faster)
+Use Lightweight Mode
+[pose]
+mode = 'lightweight' # Faster model, slightly less accurate
+ Result: 30s → 20s (1.5x faster)
+Disable Real-Time Display
+[pose]
+display_detection = false # Don't show video during processing
+ Result: 20s → 15s (1.3x faster)
+Skip Video Saving
+[pose]
+save_video = 'none' # Don't save annotated videos
+ Result: 15s → 9s (1.7x faster)
+Use Sports2D Tracker
+[pose]
+tracking_mode = 'sports2d' # Faster than deepsort for simple scenes
+ ✅ Cumulative Speedup
+Combining all optimizations:
+150s → 9s (17x faster!)
+3. Skip Unnecessary Steps
+| Step | +Skip If... | +
|---|---|
| Calibration | +Cameras haven't moved | +
| Synchronization | +Cameras natively synchronized | +
| Person Association | +Only one person in scene | +
| Filtering | +Data already clean | +
| Marker Augmentation | +Using 4+ cameras, not helpful | +
4. OpenSim Optimization
+[opensim]
+use_simple_model = true # 10x faster than full model
+ Result: 9s → 0.7s per trial
+Simple model accurate enough for most gait analysis
+5. Batch Processing Structure
+Efficient organization for processing multiple trials:
+-
+
- Single calibration for entire batch +
- Global parameters in session-level Config.toml +
- Trial-specific overrides only when needed +
- Run from session level to process all trials +
6. Frame Range Limitation
+Process only relevant portions:
+[project]
+frame_range = [100, 500] # Only process frames 100-500
+ Especially useful for long captures where action is brief.
+Maximum Speed Configuration
+For fastest processing (batch operations, prototyping):
+[pose]
+mode = 'lightweight'
+det_frequency = 100
+display_detection = false
+save_video = 'none'
+tracking_mode = 'sports2d'
+
+[filtering]
+display_figures = false
+
+[opensim]
+use_simple_model = true
+use_augmentation = false
+ 💡 Performance Tips Summary
+-
+
- GPU: Single biggest speedup (3-10x) +
- Detection frequency: Set to 50-100 for 5x speedup +
- Lightweight mode: Minimal accuracy loss for 1.5x speedup +
- Skip displays/videos: Another 2-3x cumulative +
- Simple OpenSim model: 10x faster for IK +
- Skip unnecessary steps: Don't run what you don't need +
⚠️ Speed vs Accuracy Trade-offs
+Some optimizations reduce accuracy:
+-
+
- Lightweight mode: Slightly less accurate pose detection +
- High det_frequency: May miss fast movements +
- Simple OpenSim model: Less anatomically detailed +
Recommendation: Use full accuracy for final analysis, optimized settings for testing/development.
+✅ Optimization Complete!
+You now know how to process data efficiently for any scale - from single trials to large research studies!
+