|
6 | 6 |
|
7 | 7 | ## 一、PPP 模型 |
8 | 8 |
|
9 | | - |
| 9 | +### 1、非差非组合 PPP |
10 | 10 |
|
11 | 11 |
|
12 | 12 |
|
|
58 | 58 |
|
59 | 59 |
|
60 | 60 |
|
| 61 | + |
| 62 | + |
| 63 | +### 参数数量、下标宏定义 |
| 64 | + |
| 65 | +状态向量 $\mathbf{X}$ 包含接收机位置坐标增量、接收机钟差改正、天顶对流层湿延迟、倾斜电离层延迟以及 $\mathrm{L}_{1}$ 和 $\mathrm{L}_{2}$ 上的载波相位模糊度六类基本参数 $(n=5+3 m)$ ,即: |
| 66 | +$$ |
| 67 | +\mathbf{X}=[\underbrace{\Delta x, \Delta y, \Delta z}_{\text {位置 }}, c d t_{r}, \underbrace{\mathrm{ZWD}^{2}}_{\text {天顶对流层延迟 }}, \overbrace{\mathrm{I}_{r, 1}^{1}, \cdots, \bar{I}_{r, 1}^{m}}^{L_{1} \text { 上的斜电离层延迟 }}, \underbrace{\bar{N}_{r, 1}^{1}, \cdots, \bar{N}_{r, 1}^{m},}_{L_{1} \text { 上的相位模糊度 }} \overbrace{\bar{N}_{r, 2}^{1}, \cdots, \bar{N}_{r, 2}^{m}}^{L_{2} \text { 上的相位模糊度 }}]^{T} |
| 68 | +$$ |
| 69 | +在 gamp.h |
| 70 | + |
| 71 | +N 开头的宏定义是参数数量: |
| 72 | + |
| 73 | +* **NF**:**频率数量**:电离层与双频的线性组合时为 1,否则为设置的频率数 |
| 74 | + |
| 75 | + ```cpp |
| 76 | + #define NF(opt) ((opt)->ionoopt==IONOOPT_IF12?1:(opt)->nf) |
| 77 | + ``` |
| 78 | + |
| 79 | +* **NP**:**位置参数数量**:正常为 3( XYZ坐标),dynamics 动力学模式还有估计速度加速度为 9。 |
| 80 | + |
| 81 | + ```cpp |
| 82 | + #define NP(opt) ((opt)->dynamics?9:3) |
| 83 | + ``` |
| 84 | + |
| 85 | +* **NC**:**系统数量、钟差参数数量**:设为卫星系统数量,GPS 对应的是接收机钟差,其它系统对应的是与 GPS 之间的系统间偏差 ISB(包括系统间时间偏差和硬件延迟等)。 |
| 86 | + |
| 87 | + ```cpp |
| 88 | + #define NC(opt) (NSYS) |
| 89 | + ``` |
| 90 | + |
| 91 | +* **ND**:**接收机 DCB 参数数量**:如果频率数量 nf>=3,或者双频非差非组合,设为 1,否则为 0。 |
| 92 | + |
| 93 | + ```cpp |
| 94 | + #define ND(opt) ((opt)->nf>=3||(opt)->ionoopt==IONOOPT_UC12?1:0) |
| 95 | + ``` |
| 96 | + |
| 97 | +* **NICB**:**GLONASS 伪距频间偏差 ICB 数量**:不估计是为 0,线性模型为 1,二次多项式模型为 2,每颗卫星估计一个 GLONASS 卫星数 NSATGLO,否则是 13(13 是啥意思,没看懂)。 |
| 98 | + |
| 99 | + ```cpp |
| 100 | + #define NICB(opt) ((opt)->gloicb==GLOICB_OFF?0:((opt)->gloicb==GLOICB_LNF?1:((opt)->gloicb==GLOICB_QUAD?2:((opt)->gloicb==GLOICB_1SAT?NSATGLO:13)))) |
| 101 | + ``` |
| 102 | +
|
| 103 | +* **NT**:**对流层参数数量**:不估计对流层时为 0,`TROPOPT_EST`时为 1,`TROPOPT_ESTG`时为 3。 |
| 104 | +
|
| 105 | + ```cpp |
| 106 | + #define NT(opt) ((opt)->tropopt<TROPOPT_EST?0:((opt)->tropopt==TROPOPT_EST?1:3)) |
| 107 | + ``` |
| 108 | + |
| 109 | +* **NI**:**电离层参数数量**:非差非组合模式为最大卫星数 MAXSAT,否则为 0 不估计电离层。 |
| 110 | + |
| 111 | + ```cpp |
| 112 | + #define NI(opt) ((opt)->ionoopt==IONOOPT_UC1||(opt)->ionoopt==IONOOPT_UC12?MAXSAT:0) |
| 113 | + ``` |
| 114 | + |
| 115 | +* **NR**:**除模糊度之外的参数数量**:上面的几个相加。 |
| 116 | + |
| 117 | + ```cpp |
| 118 | + #define NR(opt) (NP(opt)+NC(opt)+ND(opt)+NICB(opt)+NT(opt)+NI(opt)) |
| 119 | + ``` |
| 120 | + |
| 121 | +* **NB**:**模糊度参数数量**:频率数 NF 乘以卫星数 MAXSAT。 |
| 122 | + |
| 123 | + ```cpp |
| 124 | + #define NB(opt) (NF(opt)*MAXSAT) |
| 125 | + ``` |
| 126 | + |
| 127 | +* **NX**:**总参数数量**:除模糊度之外的参数数量 NR + 总参数数量 NX。 |
| 128 | + |
| 129 | + ```cpp |
| 130 | + #define NX(opt) (NR(opt)+NB(opt)) |
| 131 | + ``` |
| 132 | + |
| 133 | +I 开头的宏定义是参数下标: |
| 134 | + |
| 135 | +> 为啥直接从 IC 开始,没有 IP?因为位置参数在最前面,就是前 3 或者前 9,直接取就行。 |
| 136 | +
|
| 137 | +* **IC**:**钟差、ISB 参数下标**: |
| 138 | + |
| 139 | + ```cpp |
| 140 | + #define IC(s,opt) (NP(opt)+(s)) |
| 141 | + ``` |
| 142 | +
|
| 143 | +* **ID**:**DCB 参数下标**: |
| 144 | +
|
| 145 | + ```cpp |
| 146 | + #define ID(opt) (NP(opt)+NC(opt)) |
| 147 | + ``` |
| 148 | + |
| 149 | +* **IICB**:**GLONASS 伪距频间偏差 ICB 下标**: |
| 150 | + |
| 151 | + ```cpp |
| 152 | + #define IICB(s,opt) (NP(opt)+NC(opt)+ND(opt)+(s)-1) |
| 153 | + ``` |
| 154 | +
|
| 155 | +* **IT**:**对流层参数下标**: |
| 156 | +
|
| 157 | + ```cpp |
| 158 | + #define IT(opt) (NP(opt)+NC(opt)+ND(opt)+NICB(opt)) |
| 159 | + ``` |
| 160 | + |
| 161 | +* **II**:**电离层参数下标**: |
| 162 | + |
| 163 | + ```cpp |
| 164 | + #define II(s,opt) (NP(opt)+NC(opt)+ND(opt)+NICB(opt)+NT(opt)+(s)-1) |
| 165 | + ``` |
| 166 | +
|
| 167 | +* **IB**:**模糊度参数下标**: |
| 168 | +
|
| 169 | + ```cpp |
| 170 | + #define IB(s,f,opt) (NR(opt)+MAXSAT*(f)+(s)-1) |
| 171 | + ``` |
| 172 | + |
| 173 | + |
| 174 | + |
| 175 | + |
| 176 | + |
61 | 177 | ## 一、pppos |
62 | 178 |
|
63 | 179 | 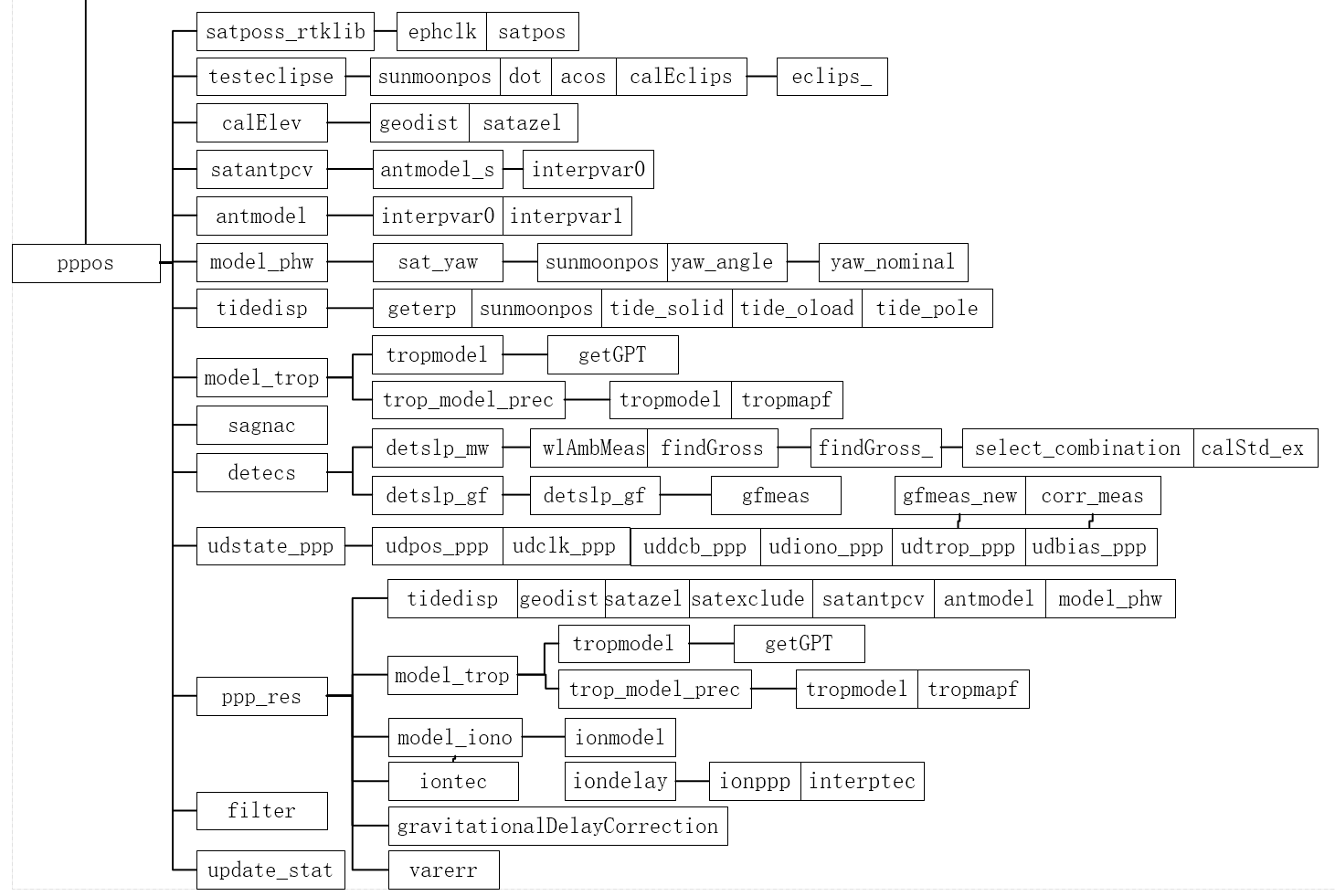 |
|
210 | 326 | $$ |
211 | 327 | 式中,$\mathbf{e}_{r}^{s}$ 表示卫星指向接收机的单位向量;$\mathbf{x}, \mathbf{y}$ 和 $\mathbf{x}^{\prime}, \mathbf{y}^{\prime}$ 分别表示接收机和卫星的两个有效偶极矢量;sign 表示符号函数。 |
212 | 328 |
|
| 329 | +```c |
| 330 | +static int model_phw(gtime_t time, int sat, const char *type, int opt, |
| 331 | + const double *rs, const double *rr, double *phw) |
| 332 | +{ |
| 333 | + double exs[3],eys[3],ek[3],exr[3],eyr[3],eks[3],ekr[3],E[9]; |
| 334 | + double dr[3],ds[3],drs[3],r[3],pos[3],cosp,ph; |
| 335 | + int i; |
| 336 | + |
| 337 | + if (opt<=0) return 1; /* no phase windup */ |
| 338 | + |
| 339 | + // 首先调用 sat-yaw 函数,根据卫星的姿态模型计算出卫星本体坐标系 X,Y 方向的单位矢量exs、eys,即上面公式里的SX、SY |
| 340 | + /* satellite yaw attitude model */ |
| 341 | + if (!sat_yaw(time,sat,type,opt,rs,exs,eys)) return 0; |
| 342 | + |
| 343 | + // 计算卫星至接收机的单位矢量 |
| 344 | + /* unit vector satellite to receiver */ |
| 345 | + for (i=0;i<3;i++) r[i]=rr[i]-rs[i]; |
| 346 | + if (!normv3(r,ek)) return 0; |
| 347 | + |
| 348 | + // 计算接收机天线在当地坐标系的北向、西向单位矢量 |
| 349 | + /* unit vectors of receiver antenna */ |
| 350 | + ecef2pos(rr,pos); |
| 351 | + xyz2enu(pos,E); |
| 352 | + exr[0]= E[1]; exr[1]= E[4]; exr[2]= E[7]; /* x = north */ |
| 353 | + eyr[0]=-E[0]; eyr[1]=-E[3]; eyr[2]=-E[6]; /* y = west */ |
| 354 | + |
| 355 | + // 根据公式以及前一次的相位缠绕误差计算当前时刻相位缠绕误差 |
| 356 | + /* phase windup effect */ |
| 357 | + cross3(ek,eys,eks); |
| 358 | + cross3(ek,eyr,ekr); |
| 359 | + for (i=0;i<3;i++) { |
| 360 | + ds[i]=exs[i]-ek[i]*dot(ek,exs,3)-eks[i]; |
| 361 | + dr[i]=exr[i]-ek[i]*dot(ek,exr,3)+ekr[i]; |
| 362 | + } |
| 363 | + cosp=dot(ds,dr,3)/norm(ds,3)/norm(dr,3); |
| 364 | + if (cosp<-1.0) cosp=-1.0; |
| 365 | + else if (cosp> 1.0) cosp= 1.0; |
| 366 | + ph=acos(cosp)/2.0/PI; |
| 367 | + cross3(ds,dr,drs); |
| 368 | + if (dot(ek,drs,3)<0.0) ph=-ph; |
| 369 | + |
| 370 | + *phw=ph+floor(*phw-ph+0.5); /* in cycle */ |
| 371 | + return 1; |
| 372 | +} |
| 373 | +``` |
| 374 | +
|
| 375 | +#### sat_yaw(): |
| 376 | +
|
| 377 | +
|
| 378 | +
|
213 | 379 |
|
214 | 380 |
|
215 | 381 | ### 4、tidedisp():潮汐改正 |
|
266 | 432 |
|
267 | 433 |
|
268 | 434 |
|
269 | | -### 四、ppp_res():残差计算、设计矩阵构建 |
270 | 435 |
|
271 | 436 |
|
272 | 437 |
|
273 | 438 |
|
274 | 439 |
|
275 | 440 |
|
| 441 | +### 四、ppp_res():残差计算、设计矩阵构建 |
| 442 | +
|
| 443 | +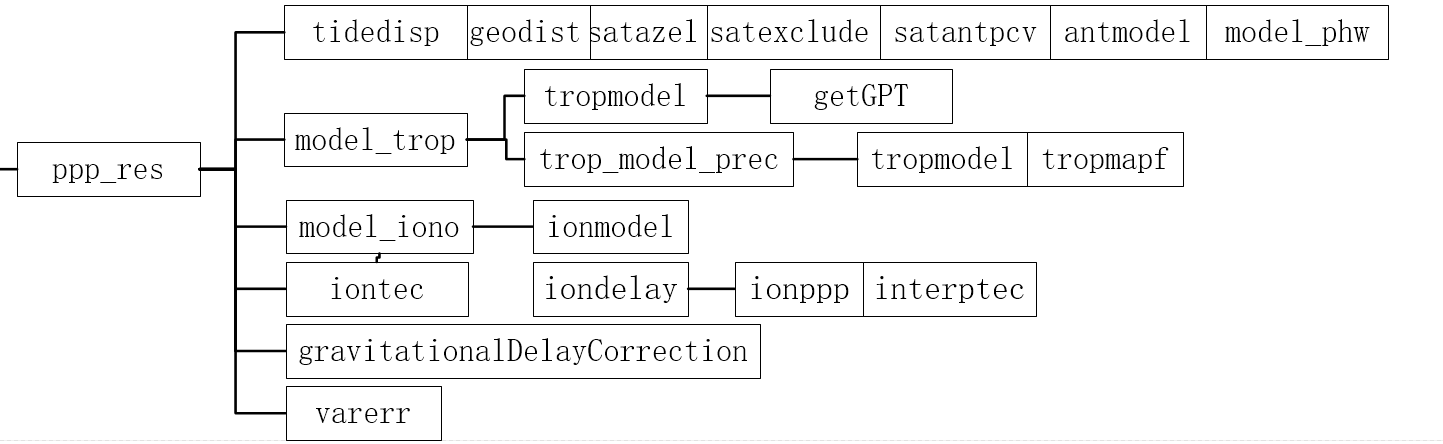 |
| 444 | +
|
276 | 445 |
|
277 | 446 |
|
278 | 447 |
|
279 | | -## 五、PPP 时间更新 |
280 | 448 |
|
281 | 449 |
|
282 | 450 |
|
| 451 | +## 五、PPP 时间更新 |
| 452 | +
|
| 453 | +时间更新函数对理解 PPP 模型至关重要, |
| 454 | +
|
283 | 455 |
|
284 | 456 |
|
285 | 457 | ### 1、udstate_ppp():Kalman 滤波时间更新 |
|
0 commit comments