 +
+_FPV Quadcopter with GPS mast_
+
+
+* INAV does NOT has the resource remapping feature, which means that **you can't change the motors order**. Be careful to wire the motors signal wires on the correct order.
+* INAV supports DShot ESC protocol, but it doesn’t behave the same way as in BetaFlight. DShot 150 or 300 is more than enough for a reliable flight. Faster protocols will reduce the reliability, so avoid using them.
+* INAV supports loop frequencies up to 8kHz, but flies just fine with 2kHz. There’s no real benefit to use such higher frequencies as it will only make the CPU more busy for others tasks.
+* DShot telemetry is supported, but not Bi-directional single-wire telemetry.
+
+### Most important settings you should take a look before first flight
+
+* `set nav_mc_hover_thr = 1450` # Base throttle value that aircraft will use for altitude hold
+* `set max_angle_inclination_rll = 450` # Maximum bank angle allowed in ANGLE mode, in decidegrees (for roll)
+* `set max_angle_inclination_pit = 450` # Maximum bank angle allowed in ANGLE mode, in decidegrees (for pitch)
+* `set nav_mc_bank_angle = 25` # Max bank angle that aircraft will do in automatic modes, in degrees (constrained by max_angle_inclination_rll and max_angle_inclination_pit)
+* `set throttle_idle = 5` # Set the minimal motor speed (in percent). The default is 15, which can be high for modern ESCs.
+* `set small_angle = 180` # Let aircraft arm in any angle
+* `set gps_ublox_use_galileo = ON` # Let GPS module use galileo satellites if it is supported (check local regulations about it)
+* `set nav_extra_arming_safety = OFF` # Let aircraft arm without GPS 3D fix (careful, navigation will not work if you do that!)
+* `set nav_wp_radius = 500` # Radius in centimeters to consider a waypoint reached
+* `set nav_wp_safe_distance = 20000` # If the first waypoint of a loaded mission is further than this value (in centimeters), INAV will not allow to arm.
+* `set nav_auto_speed = 1300` # Aircraft ground speed on automatic modes (in centimeters per second)
+* `set nav_auto_climb_rate = 200` # Aircraft vertical speed on automatic modes (centimeters per second)
+* `set nav_rth_allow_landing = FS_ONLY` # Allow aircraft to land by itself only if it’s in a Failsafe state.
+* `set nav_rth_altitude = 5000` # Altitude that aircraft will try to reach when doing RTH (in centimeters)
+* `set nav_rth_alt_mode = AT_LEAST_LINEAR_DESCENT` # Allow aircraft to come home descending to the RTH altitude. It saves energy by trading altitude for speed.
+
+
+
+_Linear descend demonstration graphic_
+
+
diff --git a/versioned_docs/version-4.1.0/advanced/MSP-Navigation-Messages.md b/versioned_docs/version-4.1.0/advanced/MSP-Navigation-Messages.md
new file mode 100644
index 0000000..dc73149
--- /dev/null
+++ b/versioned_docs/version-4.1.0/advanced/MSP-Navigation-Messages.md
@@ -0,0 +1,430 @@
+---
+title: MSP Navigation Messages
+---
+
+## MSP NAV Protocol and Types
+
+This document describes MSP navigation messages, their usage and implementation details. Both **inav** and **multiwii** implementations (which are largely the same) are documented in this article.
+
+Note that all binary values are little endian (MSP standard).
+
+## Implementation and versions
+
+This document should match the inav 1.2 (and later) and Multiwii 2.5 flight controller firmware.
+
+Prior to inav 3.0, the [inav-configurator](https://github.com/iNavFlight/inav-configurator) supported a subset of MSP Waypoint (WP) types; for inav 3.0 it supports all WP types. In addition to the inav configurator, the messages described are implemented in [mwp](https://github.com/stronnag/mwptools) (Linux / FreeBSD / Windows (Cygwin,WSL)), ezgui (Android) mission planners / ground station applications and "drone helper" (Windows 10) mission planner. mwp and ezgui support both iNav and Multiwii; WinGui is a legacy Windows / Multiwii only mission planner that also supports this message set.
+
+## WayPoint and Action Attributes
+
+Each waypoint has a type and takes a number of parameters, as below. These are used in the MSP_WP message. The final column indicated if the message is implemented for inav 1.2 (and later).
+
+| Value | Enum | P1 | P2 | P3 | Lat | Lon | Alt | iNav |
+| ---- | ---- | ---- | ---- | ---- | ---- | ---- | ---- | ---- |
+| 1 | WAYPOINT | Speed (cm/s) [1] (exception [6]) | | Altitude Mode [7] | ✔ | ✔ | ✔ | ✔ |
+| 2 | POSHOLD_UNLIM | | | | ✔ | ✔ | ✔ | [5] |
+| 3 | POSHOLD_TIME | Wait time (seconds) | (speed (cm/s)[1]) | Altitude Mode [7] | ✔ | ✔ | ✔ | ✔ 2.5 and later |
+| 4 | RTH [4] | Land if non-zero | | | | | ✔ [2] | ✔ |
+| 5 | SET_POI [3] | | | | ✔ | ✔ | | ✔ 2.6 and later |
+| 6 | JUMP | Target WP# | No. of repeats (-1 = forever) | | | | | ✔ 2.5 and later |
+| 7 | SET_HEAD [3] | Heading (degrees) | | | | | | ✔ 2.6 and later |
+| 8 | LAND | Speed (cm/s) [1] | Elevation Adjustment (m) [8] | Altitude Mode [7] | ✔ | ✔ | ✔ | ✔ 2.5 and later |
+
+1. Leg speed is an inav extension (for multi-rotors only). It is the speed on the leg terminated by the WP (so the speed for WP2 is used for the leg WP1 -> WP2) (cm/s).
+2. Not used by inav
+3. Once SET_HEAD or SET_POI is invoked, it remains active until cleared by SET_HEAD with a P1 value of -1.
+4. If a mission contains multiple RTH stanzas, then for MultiWii, the mission terminates at the first RTH. For inav, prior to c. 2.6, the mission would continue if RTH-LAND is not set, and valid waypoints follow.
+5. If the final entry in a mission is a WAYPOINT, the inav treats it as POSHOLD_UNLIM.
+6. For inav's "follow-me" mode (WP#255, POSHOLD engaged), P1 may be used to send an orientation heading (0-359 degrees).
+7. inav 3.0 and later, P3 defines the altitude mode. 0 (default, legacy) = Relative to Home, 1 = Absolute (AMSL). Ignored for releases prior to 3.0.
+8. inav 3.0 and later, P2 defines the ground elevation (in metres) for the LAND WP. If the altitude mode is absolute, this is also absolute; for relative altitude, then it is the difference between the assumed home location and the LAND WP. Ignored for releases prior to 3.0.
+
+### Geospatial Units
+
+| Field | XML Mission File | MSP_WP binary message |
+| ----- | ---------------- | --------------------- |
+| Latitude, Longitude | Decimal degrees, WGS84 | Integer, WGS84 Degrees * 1E7 |
+| Altitude | Integer Metres | Centimetres |
+
+Note that inav uses the GPS' "above mean sea level" (not "above WGS84 ellipsoid") elevation for navigation. Be aware of this distinction when using absolute rather than relative (to home) mission altitudes.
+
+### FlyBy Home Waypoints
+
+From inav 4.0, "FlyBy Home" (FBH) waypoints are supported for WAYPOINT, POSHOLD_TIME and LAND. These WPs are designated by either (or both) of
+* The latitude and longitude is zero; or
+* The `flag` field is set to 0x48 (72d, 'H')
+
+FBH waypoints have no defined location until the mission is executed, when they assume the location of the **arming** home location (not affected by `safehome`). This is ephemeral and is reset on each arming. The location uploaded to the FC is irrelevant where `flag == 0x48`; in such cases a subsequent download from the FC will return the original WP latitude and longitude, not the home used for a particular instance.
+
+### Annotated Example
+The following example, using the [MW XML](#xml-mission-files) (inav configurator, mwp, ez-gui) format, illustrates the WAYPOINT, JUMP, POSHOLD_TIME and LAND types:
+
+```
+
+
+
+_FPV Quadcopter with GPS mast_
+
+
+* INAV does NOT has the resource remapping feature, which means that **you can't change the motors order**. Be careful to wire the motors signal wires on the correct order.
+* INAV supports DShot ESC protocol, but it doesn’t behave the same way as in BetaFlight. DShot 150 or 300 is more than enough for a reliable flight. Faster protocols will reduce the reliability, so avoid using them.
+* INAV supports loop frequencies up to 8kHz, but flies just fine with 2kHz. There’s no real benefit to use such higher frequencies as it will only make the CPU more busy for others tasks.
+* DShot telemetry is supported, but not Bi-directional single-wire telemetry.
+
+### Most important settings you should take a look before first flight
+
+* `set nav_mc_hover_thr = 1450` # Base throttle value that aircraft will use for altitude hold
+* `set max_angle_inclination_rll = 450` # Maximum bank angle allowed in ANGLE mode, in decidegrees (for roll)
+* `set max_angle_inclination_pit = 450` # Maximum bank angle allowed in ANGLE mode, in decidegrees (for pitch)
+* `set nav_mc_bank_angle = 25` # Max bank angle that aircraft will do in automatic modes, in degrees (constrained by max_angle_inclination_rll and max_angle_inclination_pit)
+* `set throttle_idle = 5` # Set the minimal motor speed (in percent). The default is 15, which can be high for modern ESCs.
+* `set small_angle = 180` # Let aircraft arm in any angle
+* `set gps_ublox_use_galileo = ON` # Let GPS module use galileo satellites if it is supported (check local regulations about it)
+* `set nav_extra_arming_safety = OFF` # Let aircraft arm without GPS 3D fix (careful, navigation will not work if you do that!)
+* `set nav_wp_radius = 500` # Radius in centimeters to consider a waypoint reached
+* `set nav_wp_safe_distance = 20000` # If the first waypoint of a loaded mission is further than this value (in centimeters), INAV will not allow to arm.
+* `set nav_auto_speed = 1300` # Aircraft ground speed on automatic modes (in centimeters per second)
+* `set nav_auto_climb_rate = 200` # Aircraft vertical speed on automatic modes (centimeters per second)
+* `set nav_rth_allow_landing = FS_ONLY` # Allow aircraft to land by itself only if it’s in a Failsafe state.
+* `set nav_rth_altitude = 5000` # Altitude that aircraft will try to reach when doing RTH (in centimeters)
+* `set nav_rth_alt_mode = AT_LEAST_LINEAR_DESCENT` # Allow aircraft to come home descending to the RTH altitude. It saves energy by trading altitude for speed.
+
+
+
+_Linear descend demonstration graphic_
+
+
diff --git a/versioned_docs/version-4.1.0/advanced/MSP-Navigation-Messages.md b/versioned_docs/version-4.1.0/advanced/MSP-Navigation-Messages.md
new file mode 100644
index 0000000..dc73149
--- /dev/null
+++ b/versioned_docs/version-4.1.0/advanced/MSP-Navigation-Messages.md
@@ -0,0 +1,430 @@
+---
+title: MSP Navigation Messages
+---
+
+## MSP NAV Protocol and Types
+
+This document describes MSP navigation messages, their usage and implementation details. Both **inav** and **multiwii** implementations (which are largely the same) are documented in this article.
+
+Note that all binary values are little endian (MSP standard).
+
+## Implementation and versions
+
+This document should match the inav 1.2 (and later) and Multiwii 2.5 flight controller firmware.
+
+Prior to inav 3.0, the [inav-configurator](https://github.com/iNavFlight/inav-configurator) supported a subset of MSP Waypoint (WP) types; for inav 3.0 it supports all WP types. In addition to the inav configurator, the messages described are implemented in [mwp](https://github.com/stronnag/mwptools) (Linux / FreeBSD / Windows (Cygwin,WSL)), ezgui (Android) mission planners / ground station applications and "drone helper" (Windows 10) mission planner. mwp and ezgui support both iNav and Multiwii; WinGui is a legacy Windows / Multiwii only mission planner that also supports this message set.
+
+## WayPoint and Action Attributes
+
+Each waypoint has a type and takes a number of parameters, as below. These are used in the MSP_WP message. The final column indicated if the message is implemented for inav 1.2 (and later).
+
+| Value | Enum | P1 | P2 | P3 | Lat | Lon | Alt | iNav |
+| ---- | ---- | ---- | ---- | ---- | ---- | ---- | ---- | ---- |
+| 1 | WAYPOINT | Speed (cm/s) [1] (exception [6]) | | Altitude Mode [7] | ✔ | ✔ | ✔ | ✔ |
+| 2 | POSHOLD_UNLIM | | | | ✔ | ✔ | ✔ | [5] |
+| 3 | POSHOLD_TIME | Wait time (seconds) | (speed (cm/s)[1]) | Altitude Mode [7] | ✔ | ✔ | ✔ | ✔ 2.5 and later |
+| 4 | RTH [4] | Land if non-zero | | | | | ✔ [2] | ✔ |
+| 5 | SET_POI [3] | | | | ✔ | ✔ | | ✔ 2.6 and later |
+| 6 | JUMP | Target WP# | No. of repeats (-1 = forever) | | | | | ✔ 2.5 and later |
+| 7 | SET_HEAD [3] | Heading (degrees) | | | | | | ✔ 2.6 and later |
+| 8 | LAND | Speed (cm/s) [1] | Elevation Adjustment (m) [8] | Altitude Mode [7] | ✔ | ✔ | ✔ | ✔ 2.5 and later |
+
+1. Leg speed is an inav extension (for multi-rotors only). It is the speed on the leg terminated by the WP (so the speed for WP2 is used for the leg WP1 -> WP2) (cm/s).
+2. Not used by inav
+3. Once SET_HEAD or SET_POI is invoked, it remains active until cleared by SET_HEAD with a P1 value of -1.
+4. If a mission contains multiple RTH stanzas, then for MultiWii, the mission terminates at the first RTH. For inav, prior to c. 2.6, the mission would continue if RTH-LAND is not set, and valid waypoints follow.
+5. If the final entry in a mission is a WAYPOINT, the inav treats it as POSHOLD_UNLIM.
+6. For inav's "follow-me" mode (WP#255, POSHOLD engaged), P1 may be used to send an orientation heading (0-359 degrees).
+7. inav 3.0 and later, P3 defines the altitude mode. 0 (default, legacy) = Relative to Home, 1 = Absolute (AMSL). Ignored for releases prior to 3.0.
+8. inav 3.0 and later, P2 defines the ground elevation (in metres) for the LAND WP. If the altitude mode is absolute, this is also absolute; for relative altitude, then it is the difference between the assumed home location and the LAND WP. Ignored for releases prior to 3.0.
+
+### Geospatial Units
+
+| Field | XML Mission File | MSP_WP binary message |
+| ----- | ---------------- | --------------------- |
+| Latitude, Longitude | Decimal degrees, WGS84 | Integer, WGS84 Degrees * 1E7 |
+| Altitude | Integer Metres | Centimetres |
+
+Note that inav uses the GPS' "above mean sea level" (not "above WGS84 ellipsoid") elevation for navigation. Be aware of this distinction when using absolute rather than relative (to home) mission altitudes.
+
+### FlyBy Home Waypoints
+
+From inav 4.0, "FlyBy Home" (FBH) waypoints are supported for WAYPOINT, POSHOLD_TIME and LAND. These WPs are designated by either (or both) of
+* The latitude and longitude is zero; or
+* The `flag` field is set to 0x48 (72d, 'H')
+
+FBH waypoints have no defined location until the mission is executed, when they assume the location of the **arming** home location (not affected by `safehome`). This is ephemeral and is reset on each arming. The location uploaded to the FC is irrelevant where `flag == 0x48`; in such cases a subsequent download from the FC will return the original WP latitude and longitude, not the home used for a particular instance.
+
+### Annotated Example
+The following example, using the [MW XML](#xml-mission-files) (inav configurator, mwp, ez-gui) format, illustrates the WAYPOINT, JUMP, POSHOLD_TIME and LAND types:
+
+```
+
+| Name | +Type | +Usage | +
|---|---|---|
| gps_mode | +uchar | +None +PosHold +RTH +Mission |
+
| nav_state | +uchar | +None +RTH Start +RTH Enroute +PosHold infinite +PosHold timed +WP Enroute +Process next +Jump +Start Land +Land in Progress +Landed +Settling before land +Start descent +Hover above home +Emergency Landing |
+
| action | +uchar | +(last wp, next wp?) | +
| wp_number | +uchar | +(last wp, next wp?) | +
| nav_error | +uchar | +Navigation system is working +Next waypoint distance is more than the safety limit, aborting mission +GPS reception is compromised - pausing mission, COPTER IS ADRIFT! +Error while reading next waypoint from memory, aborting mission. +Mission Finished. +Waiting for timed position hold. +Invalid Jump target detected, aborting mission. +Invalid Mission Step Action code detected, aborting mission. +Waiting to reach return to home altitude. +GPS fix lost, mission aborted - COPTER IS ADRIFT! +Copter is disarmed, navigation engine disabled. +Landing is in progress, check attitude if possible. |
+
| target_bearing | +int16 | +(presumably to the next WP?) | +
 +
+PPM Receiver
+
+
+
+PPM Receiver
+
+ +
+Of course, according to the receiver used you need to use the aproppriate firmware for CC3D - inav_1.6.0_CC3D.hex for parallel PWM or inav_1.6.0_CC3D_PPM1.hex PPM receiver. For more information about CC3D pinout check the [CC3D](https://github.com/iNavFlight/inav/blob/master/docs/Board%20-%20CC3D.md) page
+
+I usually don't like the motor rotation on arm, so I switch on the "Don't spin motors when armed" feature.
+
+The new iNAV firmware has all PWM outputs disable until you switch on the "Enable motor and servo output"
+
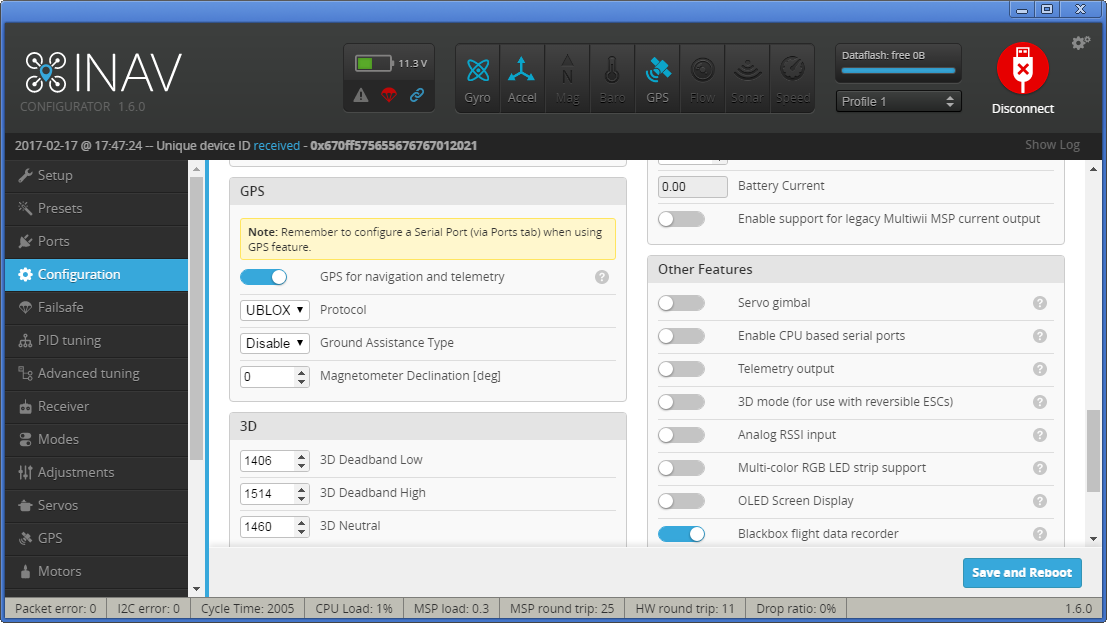
+Switch on the GPS feature, and select the protocol.
+
+
+If your GPS receiver have enough satellites visible you'll be able to check the 3D fix in GPS tab
+![3D fix] (http://s8.hostingkartinok.com/uploads/images/2017/02/2db676b5f03d436480919b1cbc945fb5.png)
+
+By default iNav won't arm without GPS fix if the GPS feature is ON. To disable it use CLI: "set nav_extra_arming_safety = OFF". And it is highly recomended to switch it back ON before real flights.
+
+If your receiver connection is other than Parallel PWM Receiver, then you'll be able to setup battery voltage, current, RSSI monitoring. It is very userful. So IMHO a PPM is a must for CC3D FC.
+
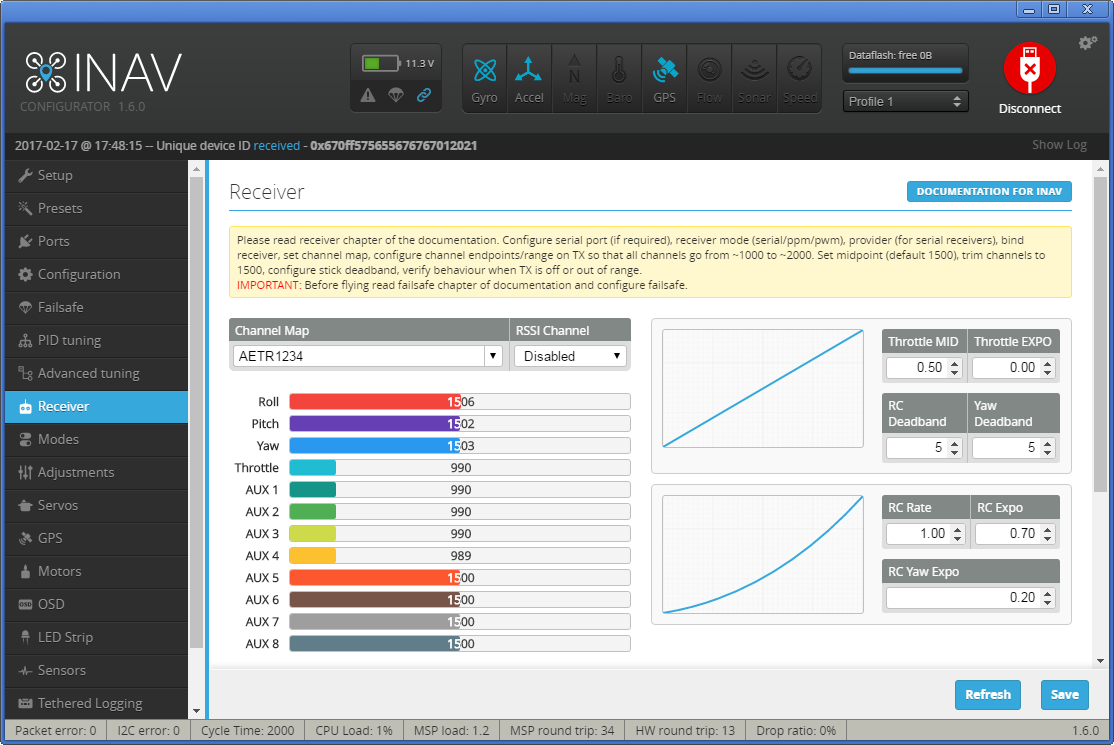
+On the Receiver tab set up the channel order and their correspondence to TX sticks movements.
+
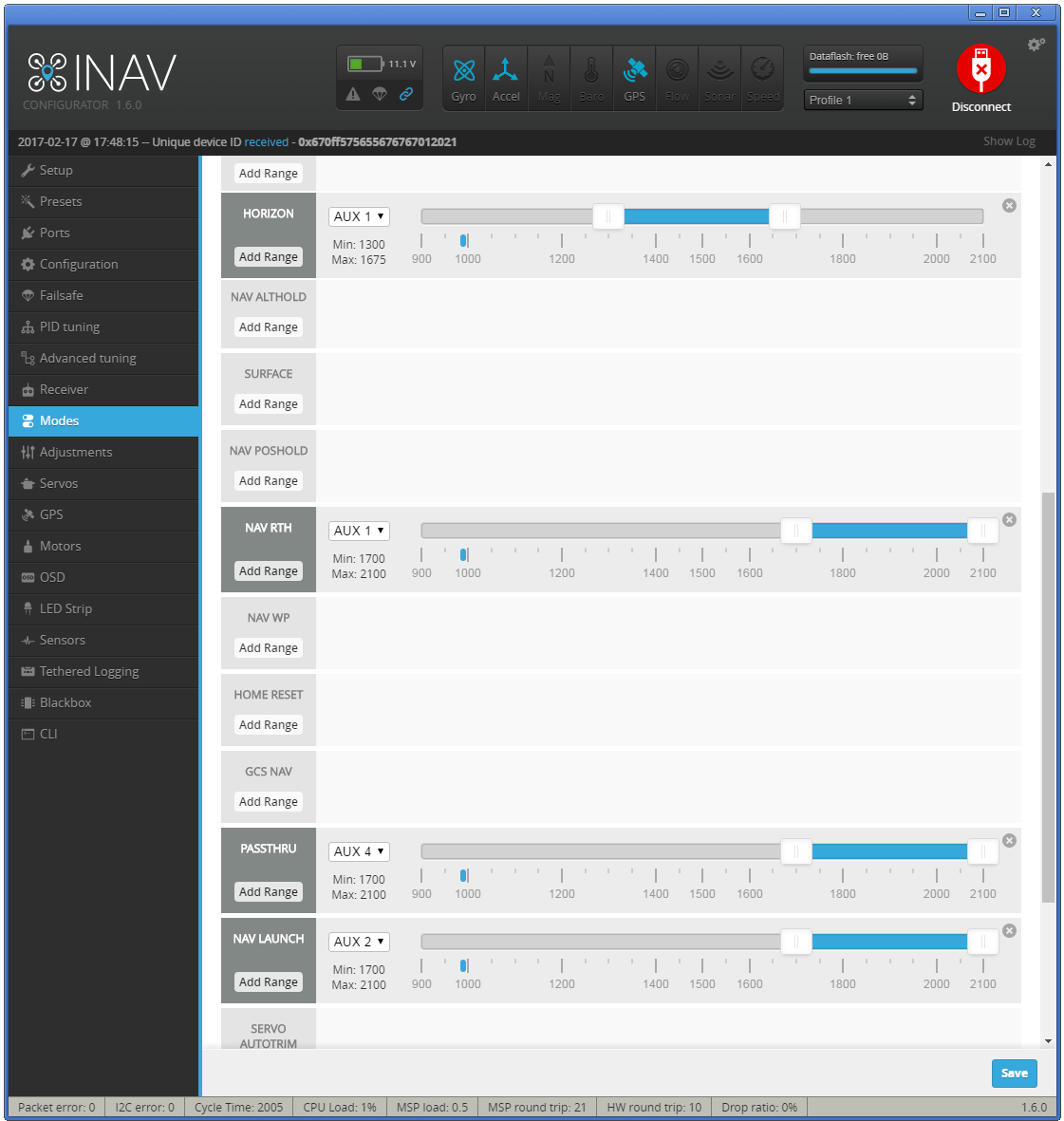
+On the Modes tab set up the flight modes according to the position of the AUX channels. For example, if you have a 3pos switch for the AUX1 you can get at minimum the following:
+
+* minimum channel value - do not select any mode - only gyros will work. The hand launch take off in this mode is excellent.
+* middle value - Angle or Horizon.
+* maximum value - RTH. Automatic return home.
+
+
+
+### Failsafe
+
+Check [this link](../features/Failsafe.md for RTH failsafe
+
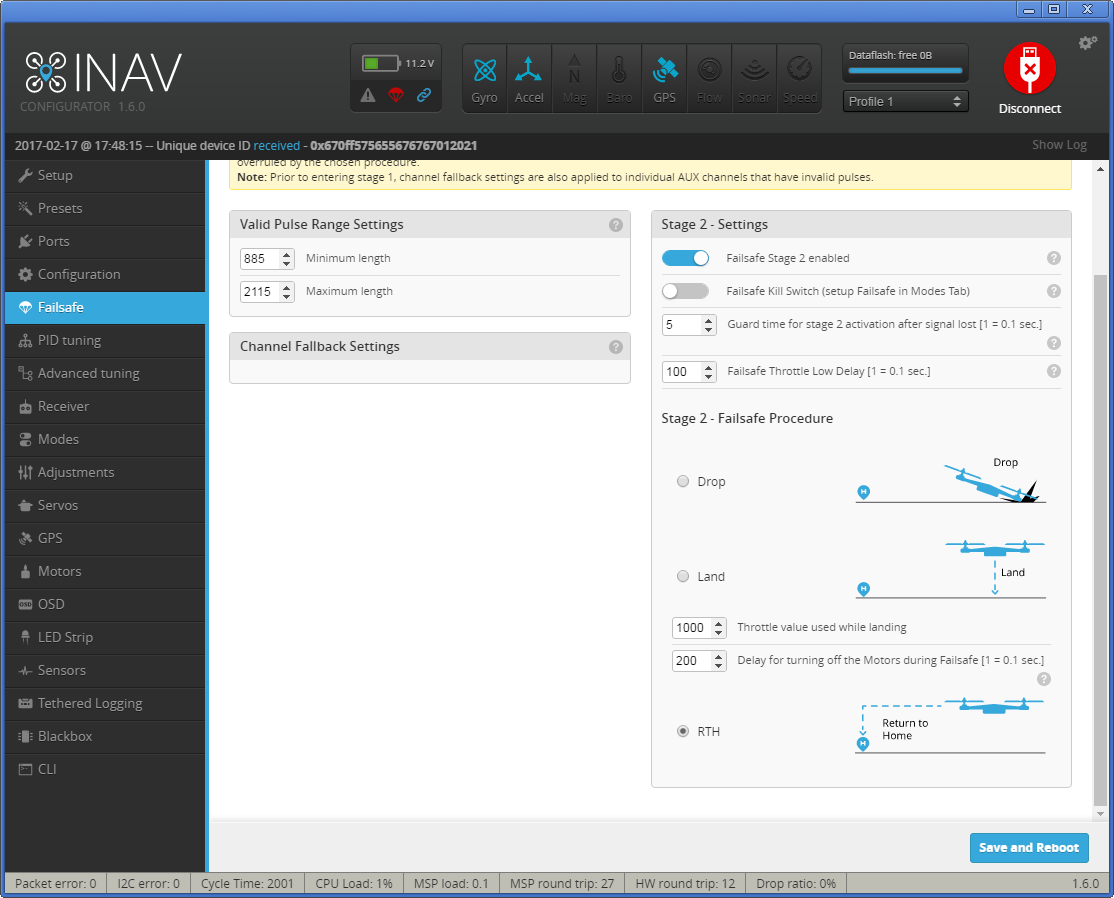
+Starting from iNav 1.6 the Filesafe feature is very transparent and clear. For the failsafe to work you'll need:
+* Setup the receiver output no signal when your TX is off
+* OR assign the Failsafe mode to one of the channels and force it to trigger when your TX is off
+
+Set the desired Failsafe behavior. I prefer RTH.
+
+
+###Telemetry
+
+Connect your TX line and configure FC as explained above. Nowadays you can use several telemetry systems as [mwptools](https://github.com/stronnag/mwptools), [EZGUI](http://ez-gui.com/), [LTM Telemetry OLED](https://github.com/sppnk/LTM-Telemetry-OLED) and possibly others. The USART port can be shared with a OSD or used only for one of both features. For example, you can fly FPV w/o telemetry (just in your googles) or fly thermal soaring 3rd view w/o OSD. Or have both. Amazing you can do this with a simple cc3d, isnt it?.
+
+###Transmitter setup
+
+You should adjust (normal or reverse) on your transmitter so sticks correspond to below:
+
+In reciever tab:
+* Throttle stick push away - increased value
+* Yaw (Rudder) stick right - increased value
+* Pitch (Elevator) stick push away - increased value
+* Roll (Ailerons) stick right - increased value
+
+Also use subtrim to get center value of 1500us and use travel adjustment to get at lowest value 1000us and highest 2000us when moving sticks.
+
+
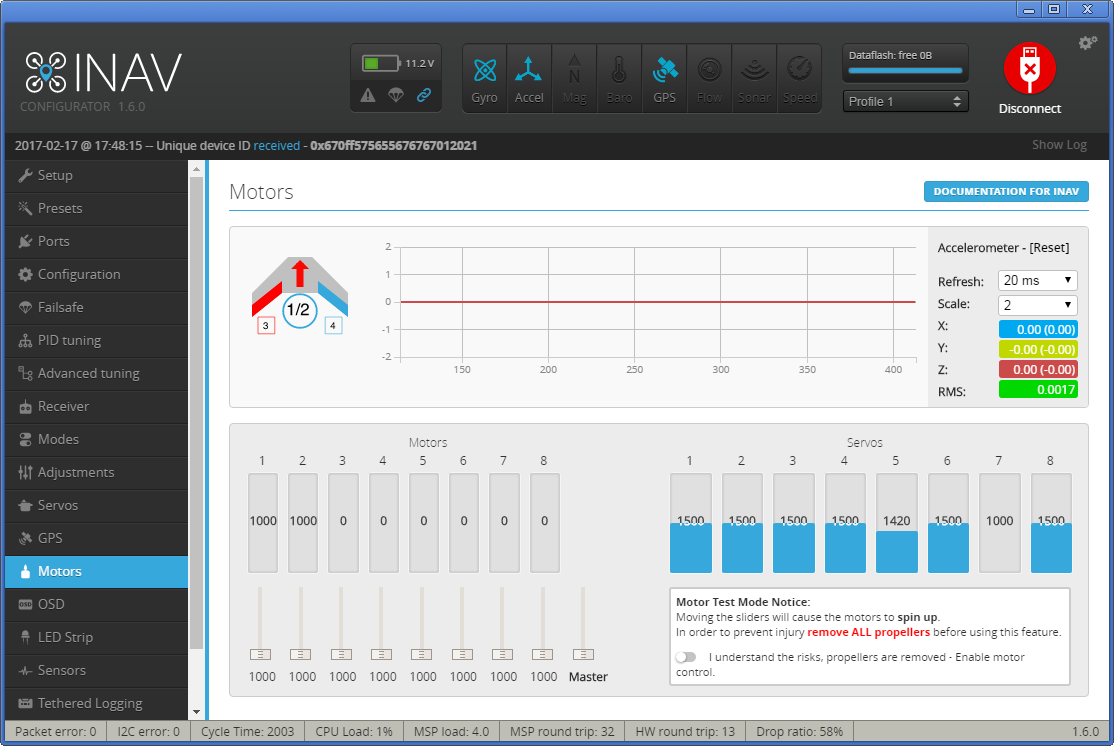
+### Motors
+
+After this follow to the Motors tab, rock your plane and notice what levels are moving depending on PITCH, ROLL and YAW angles. You can remember it or write it down. ROLL - 4,5; PITCH - 3, YAW - 6.
+
+
+
+Turn on your transmitter, switch to the Angle or Horizon flight mode and follow the Servos tab.
+
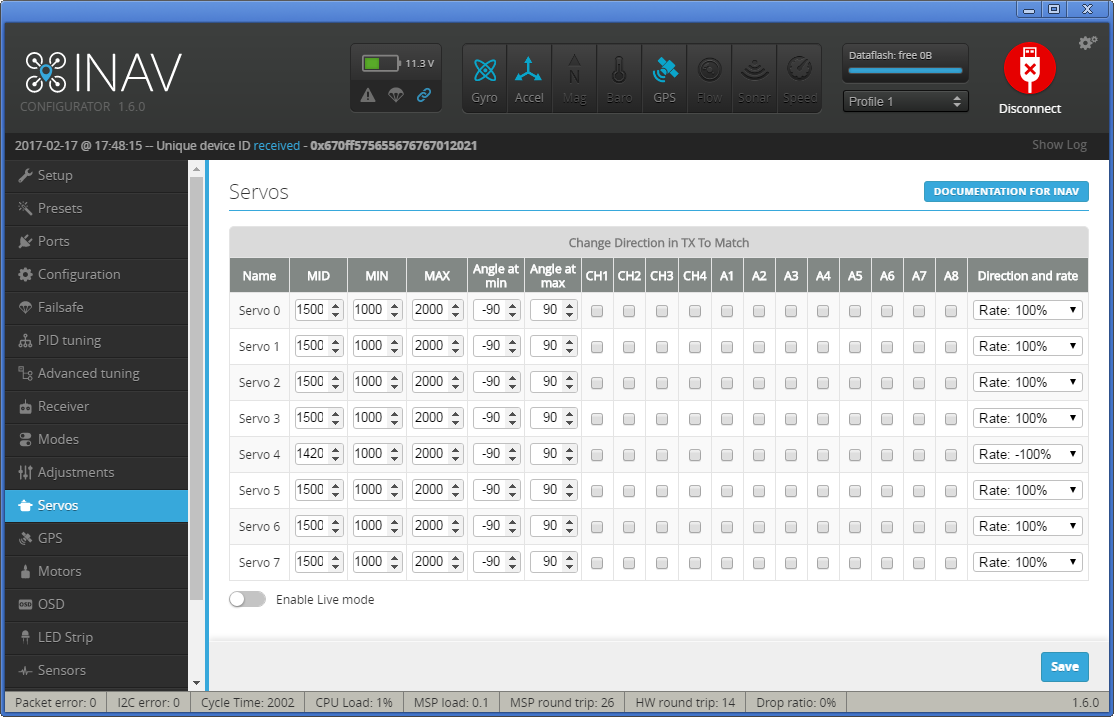
+### Servo setup
+
+
+
+Here you need to be very attentive. In this tab you set up endpoints, neutral, rates and reverse for stabilization modes. Servo numbering in the tab starts from 0!
+
+For the Elevator, tilt the plane's tail down, and the Elevator should go down. If the elevator goes up, then you need to set the Rate (the right-most drop down list) Servo 2 with negative sign.
+
+Tilt the left wing down. Left Aileron should go down and right one should go up. If it is not so, then put negative Rate values for Servo 3 and Servo 4 (if your ailerons are connected by means of Y-cable, than you can change the settings for only one Servo or connect the Y-cable to other Servo out).
+
+Turn the tail to the left, and the Rudder should go to the left. Otherwise switch the Servo 5 Rate to negative.
+
+After this stick movement should also move servos the correct way. (General rules: Elevator stick down - elevator goes up, Aileron stick to the left - left aileron is up, right aileron is down, Rudder stick to the left, rudder goes to the left)
+
+Attention! all the endpoints, neutrals, trimmers should be done on this tab, not in transmitter!
+
+### Recommended power layout
+
+To prevent brownout its wise to power servos with one BEC and the flight controller + other equipment with another BEC.
+
+This is one way to accomplish it:
+
+Glued a new row of pins onto the case of the flightcontroller, the must be connected together. (See the bottom of pins)
+
+All servos and ESC is connected to flightcontroller, except positive wire which goes to the new row. (This line gets its power from the BEC in the ESC)
+
+Another external BEC is connected at random positive and negativ pin on flight controller to power it, the receiver and GPS.
+
+This way if one servo get stuck and draws alot of amps you shouldnt risk your flight system to power down.
+
+
+
+
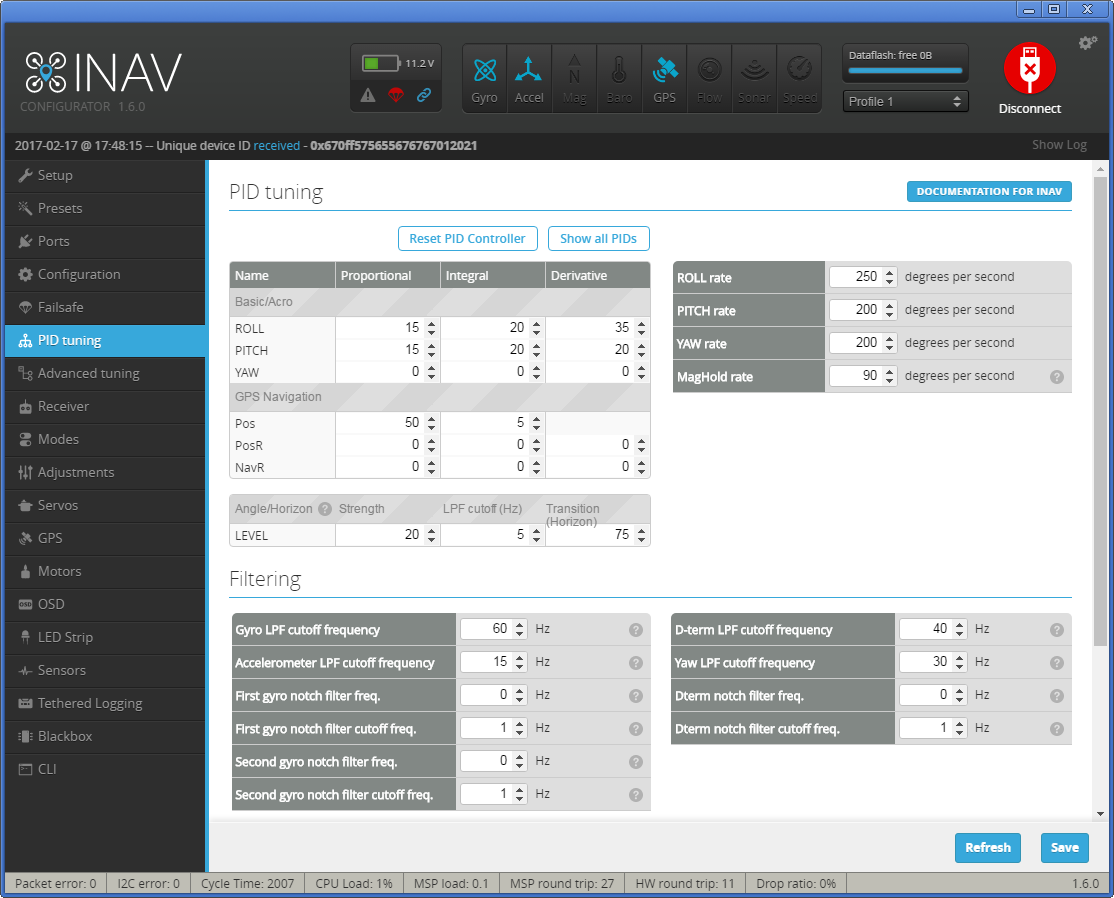
+### PID/PIFF Settings
+The default PID settings that are set using Presets tab are a good starting point but usually you may need to chnge them if you want yor plane to fly really stable.
+Here are my PIFF settings for a small 800mm flying wing - EPP Rainbow.
+
+
+DigitalEntity wrote about the PIFF controller setup procedure the following, I have nothing to add:
+
+If you have inflight adjustments - this will be easier for you. I tuned like this:
+
+0) Fly ANGLE mode, LOS, calm day. Started with these PIFFs: P=5, I=10, D/FF = 20
+
+1) Give hard roll command, watch how plane executes it. It should be smooth from start to finish, without (or with minimal) oscillation at the end of the roll, without much wobble. If it oscillates at the end of maneuver - reduce FF; if it starts fast, then slows down and after a moment pushes it further - that's indication of too low FF
+
+2) Repeat for pitch
+
+3) I dialed up FF as much as possible until I started to get oscillations at the end of maneuver and backed about 20%
+
+4) If it doesn't reach commanded angle - increase I-gain (best verifiable with OSD indication for roll/pitch angles
+
+5) Wait for some wind (to get some turbulence)
+
+6) Dial up P to fight turbulence better. In ANGLE mode I+FF will keep aircraft nice and level, but P will improve turbulence handling. WARNING - increasing P will cause much more active servos and reduce their life expectancy.
+
+### OSD setup
+I prefer using MW-OSD. It supports many protocols and also has native support of iNAV. Say you have a minimOSD or micro minimOSD. So first you need to upload [MWOSD](http://www.mwosd.com/) firmware to your minimOSD. You can find pretty straight forward install guide following the [link](https://github.com/ShikOfTheRa/scarab-osd/blob/master/OTHER/DOCUMENTATION/FirmwareFlashing.md). As usual you use Arduino IDE for global OSD config. All changes are done in the Config.h file. In our case we need to leave uncommented the following lines:
+
+OSD HARDWARE settings:
+
+`#define MINIMOSD`
+
+CONTROLLER SOFTWARE
+
+`#define iNAV`
+
+AIRCRAFT/INSTALLATION TYPE settings
+
+`#define FIXEDWING`
+
+TELEMETRY LTM settings
+
+`#define FORCE_MSP` // Uncomment to enable use of MSP as well as telemetry. Uses more memory
+
+`#define PROTOCOL_LTM` // To use LTM protocol instead of MSP
+
+`#define BAUDRATE 9600`
+
+
+Usualy it is enough.
+
+You may enable also rather helpful `#define MAPMODE` under FEATURES that allows you to see the map indication of relative positions of home and aircraft.
+
+Configure config.h allowing LTM if you want to share USART1 with your telemetry system, as explained above.
+
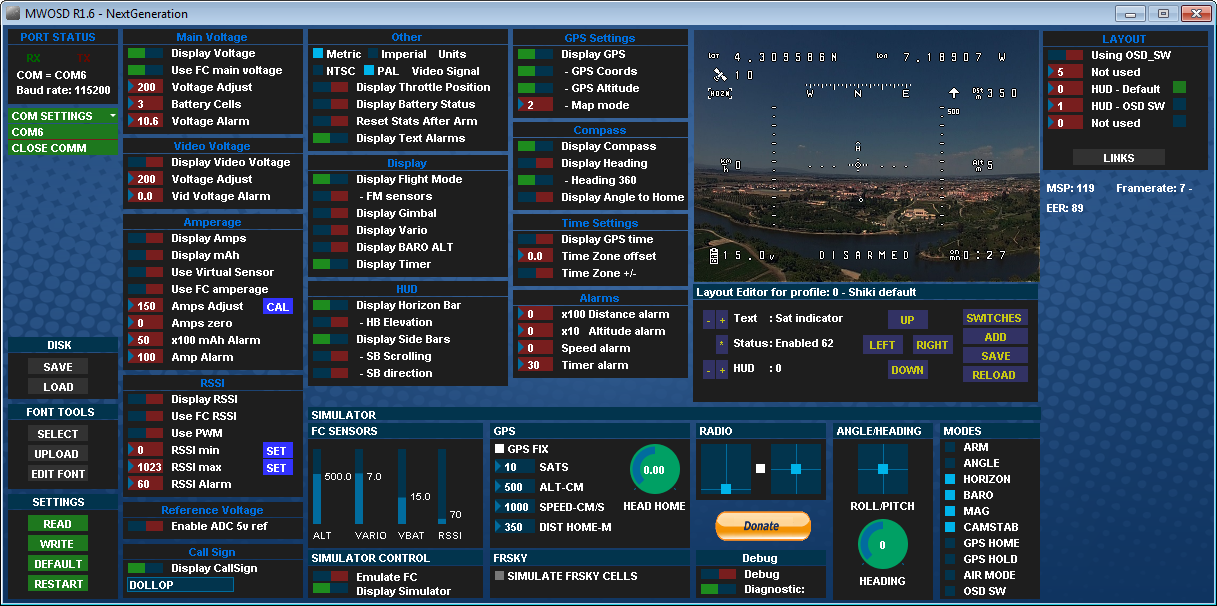
+All other settings are done in MWOSD configurator. Everything you need is to select the font you like, OSD indicators' positions. As iNAV takes care of voltage/current/rssi monitoring you'll need to ask the MWOSD to take these values from the FC (see the fig)
+
+The screenshot of the MWOSD configuration is shown below:
+
+
+Watch this demo video of the iNAV flight and RTH function:
+
+[](https://www.youtube.com/watch?v=GYd7mxGxNL8)
+
+Good luck!
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/quickstart/Howto:-CC3D-flight-controller,-minimOSD-,-telemetry-and-GPS-for-fixed-wing.md b/versioned_docs/version-4.1.0/quickstart/Howto:-CC3D-flight-controller,-minimOSD-,-telemetry-and-GPS-for-fixed-wing.md
new file mode 100644
index 0000000..1a58773
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/Howto:-CC3D-flight-controller,-minimOSD-,-telemetry-and-GPS-for-fixed-wing.md
@@ -0,0 +1,235 @@
+---
+title: CC3D For Fixed Wing 1
+---
+
+## Index
+1. Features
+
+2. What is needed
+
+3. Flashing iNAV firmware to CC3D.
+
+4. Basic settings
+
+Flight controller orientation.
+
+Port settings
+
+Configuration
+
+Failsafe
+
+Transmitter setup
+
+Motors
+
+Servo setup
+
+Recommended power layout
+
+OSD setup
+
+
+
+## 1. Features
+- Stabilization (Angle, Horizon modes)
+- RTH (baro and mag are not needed for fixed wing)
+- Waypoint missions (with EZGUI android apk).
+- Battery monitoring
+- RSSI monitoring
+- Failsafe
+- Telemetry
+- etc
+
+## 2. What is needed
+- Flight controller (one from the list, this guide shows how to setup CC3D)
+- OSD (minimOSD or any other that supports Cleanflight)
+- RX with telemetry support (just in case you want also telemetry). And a telemetry capable ground system.
+- GPS receiver (any that supports at least 5Hz update)
+- FPV hardware, airframe, RC
+
+## 3. Flashing iNAV firmware to CC3D.
+First you need to download a precompiled firmware for the board [here](https://github.com/iNavFlight/inav/releases). Select one of the releases precompiled for CC3D:
+- _inav_x.x.x_CC3D.hex_ for PWM receiver
+- _inav_x.x.x_CC3D_PPM1.hex_ for PPM receiver
+
+Next, you can check [numerous guides](https://www.youtube.com/watch?v=eClp-YBeSms&t=0s) how to flash CC3D with third party firmware (Attention, you'll need a FTDI adapter for the purpose). Of course you need to specify the previously downloaded firmware for the flashing. For now, if you have servos, it is not advisable to flash with them attached, because there is high frequency sent with default configuration, and you can burn them (the way -for now- is flash, configure plane and then attach servos).
+
+## 4. Basic settings
+
+### Port settings
+It is done using Ports tab 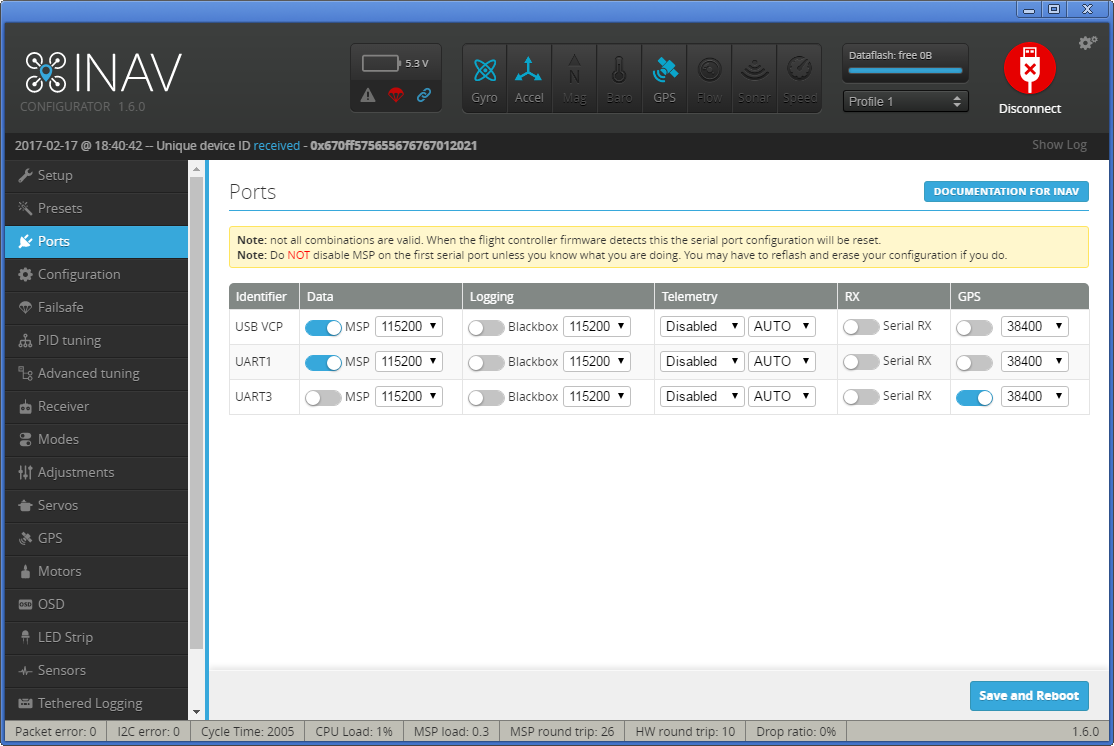.
+
+- UART1 - leave default value. You'll connect here either OSD or FTDI to setup the FC. If you want telemetry select it in Inav configurator, so you can have telemetry when the aircraft is armed. In this case, your OSD should be capable to read LTM, in order to mantain working OSD and telemetry at the same time. You have to connect the TX line from CC3D to both OSD and RX telemetry capable receiver (as openlrsng systems). MWOSD can read both MSP and LTM telemetry.
+- UART3 - for GPS. Switch on the option and select the correct port speed (38400 or 57600). Please pay attention that when using a ublox GPS receiver family 6-8 you don't need to make any configurations in the u-center. The flight controller under iNAV will do everything what is needed.
+
+### Configuration
+On the Configuration tab in the Mixer group select the Airplane or Flying Wing depending on the airframe you are using.
+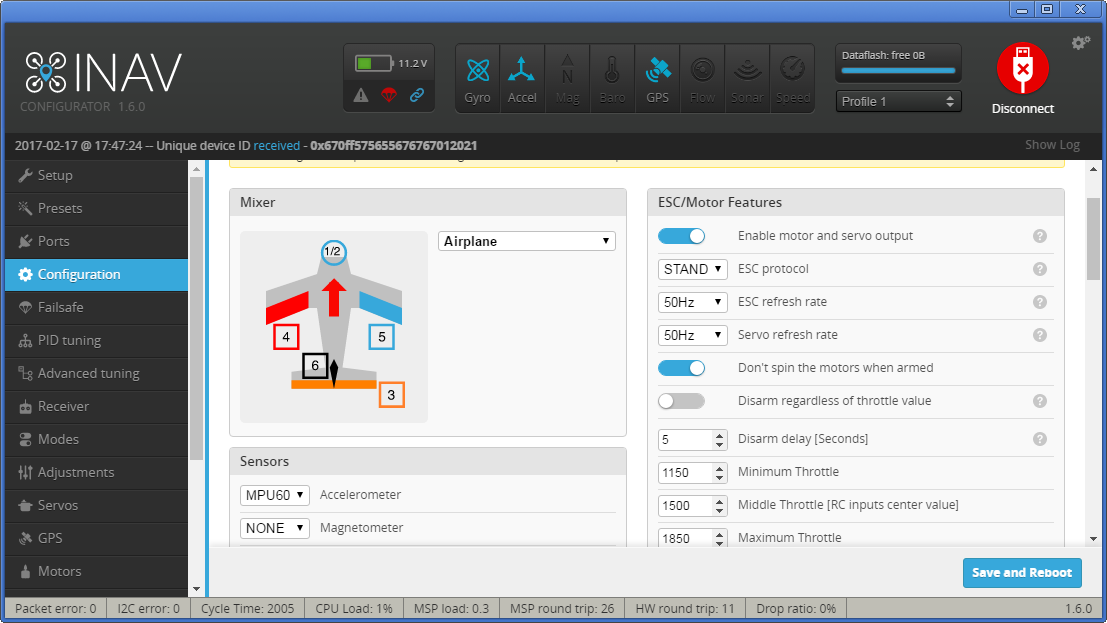
+Do not pay attention on the servo numbering! It will be described later.
+Now you need to make the accelerometer calibration. It is mandatory to fulfill it and it is better to do it before installing the FC into airframe. Please follow the [instructions](https://github.com/iNavFlight/inav/wiki/Sensor-calibration) to perform the 6 point accelerometer calibration.
+
+### Flight controller orientation.
+After the calibration is done you may select the sutable board orientation
+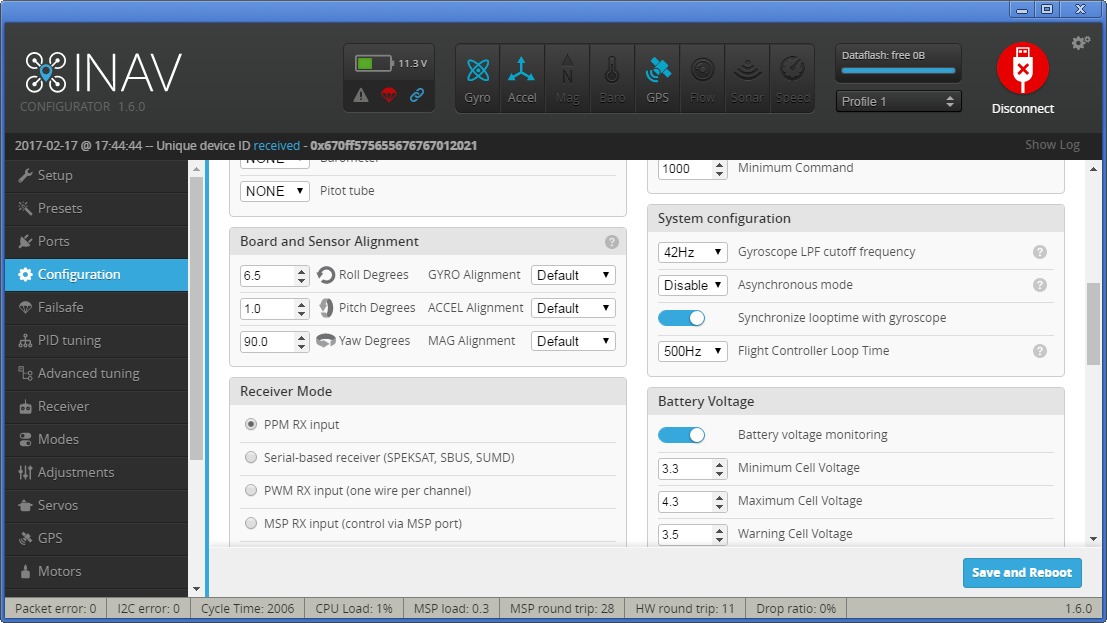
+If you need to install your FC board into airplane such a way that the forward arrow points to some other direction, you need to change the FC orientation. This can be done or in the iNAV GUI or from CLI. I prefer doing it from GUI. Follow the Configuration tab and Board and sensor Alignment. If you want to mount the CC3D flight controller with USB plug to the left you need to set the Yaw Degrees parameter to 90. If you are going to mount the FC with USB plug facing right, then the Yaw Degrees = 270, etc.
+
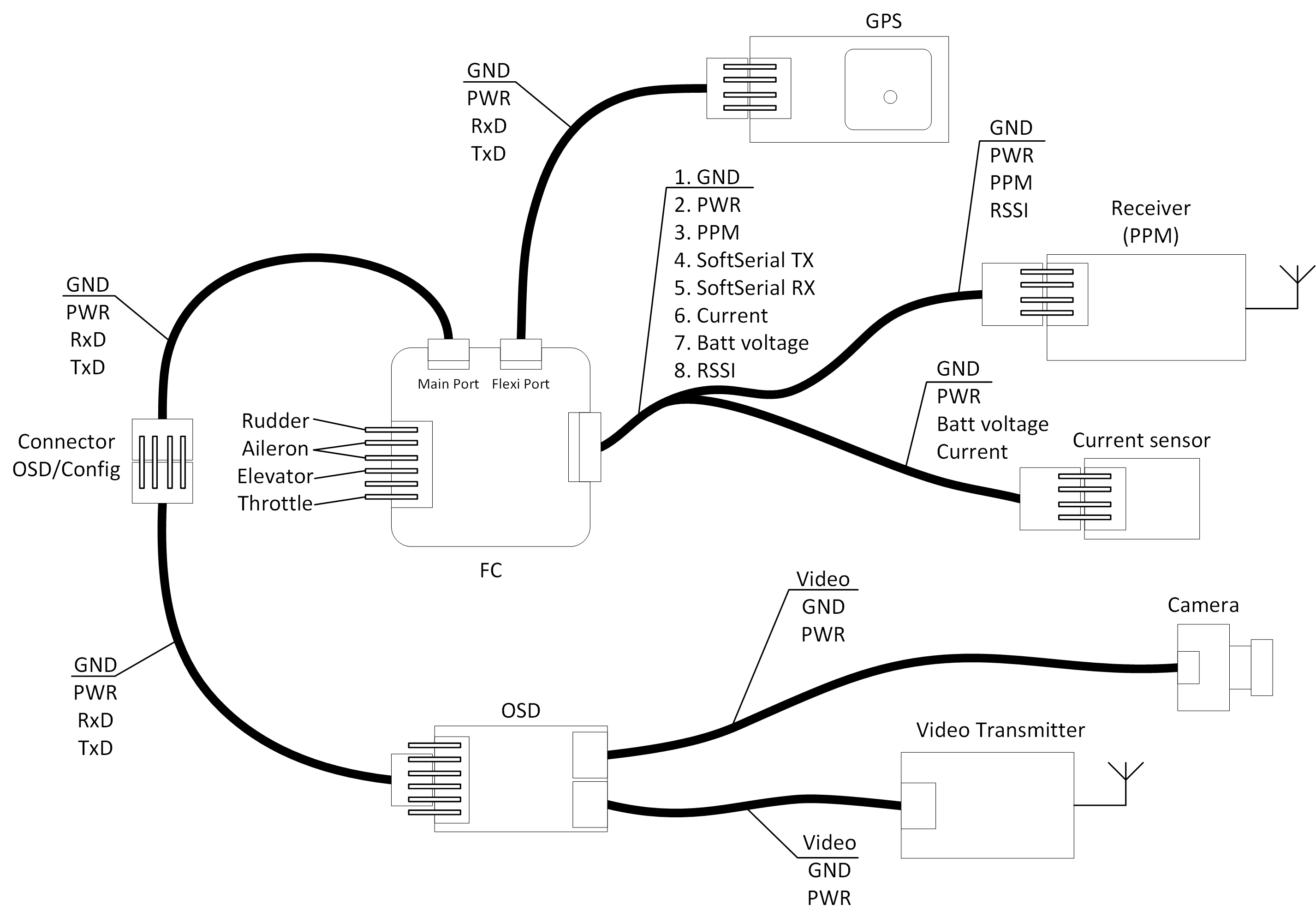
+Now you are ready to connect your hardware according to the schemes:
+
+Parallel PWM Receiver ([click here](http://s8.hostingkartinok.com/uploads/images/2016/02/a47fb019c7783371053239a3d23a8d46.jpg) to see the real hardware photo)
+
+
+
+PPM Receiver
+
+
+
+Of course, according to the receiver used you need to use the aproppriate firmware for CC3D - inav_1.6.0_CC3D.hex for parallel PWM or inav_1.6.0_CC3D_PPM1.hex PPM receiver. For more information about CC3D pinout check the [CC3D](https://github.com/iNavFlight/inav/blob/master/docs/Board%20-%20CC3D.md) page
+
+I usually don't like the motor rotation on arm, so I switch on the "Don't spin motors when armed" feature.
+
+The new iNAV firmware has all PWM outputs disable until you switch on the "Enable motor and servo output"
+
+Switch on the GPS feature, and select the protocol.
+
+
+If your GPS receiver have enough satellites visible you'll be able to check the 3D fix in GPS tab
+![3D fix] (http://s8.hostingkartinok.com/uploads/images/2017/02/2db676b5f03d436480919b1cbc945fb5.png)
+
+By default iNav won't arm without GPS fix if the GPS feature is ON. To disable it use CLI: "set nav_extra_arming_safety = OFF". And it is highly recomended to switch it back ON before real flights.
+
+If your receiver connection is other than Parallel PWM Receiver, then you'll be able to setup battery voltage, current, RSSI monitoring. It is very userful. So IMHO a PPM is a must for CC3D FC.
+
+On the Receiver tab set up the channel order and their correspondence to TX sticks movements.
+
+On the Modes tab set up the flight modes according to the position of the AUX channels. For example, if you have a 3pos switch for the AUX1 you can get at minimum the following:
+
+* minimum channel value - do not select any mode - only gyros will work. The hand launch take off in this mode is excellent.
+* middle value - Angle or Horizon.
+* maximum value - RTH. Automatic return home.
+
+
+
+### Failsafe
+
+Check [this link](https://github.com/iNavFlight/inav/wiki/Failsafe) for RTH failsafe
+
+Starting from iNav 1.6 the Filesafe feature is very transparent and clear. For the failsafe to work you'll need:
+* Setup the receiver output no signal when your TX is off
+* OR assign the Failsafe mode to one of the channels and force it to trigger when your TX is off
+
+Set the desired Failsafe behavior. I prefer RTH.
+
+
+###Telemetry
+
+Connect your TX line and configure FC as explained above. Nowadays you can use several telemetry systems as [mwptools](https://github.com/stronnag/mwptools), [EZGUI](http://ez-gui.com/), [LTM Telemetry OLED](https://github.com/sppnk/LTM-Telemetry-OLED) and possibly others. The USART port can be shared with a OSD or used only for one of both features. For example, you can fly FPV w/o telemetry (just in your googles) or fly thermal soaring 3rd view w/o OSD. Or have both. Amazing you can do this with a simple cc3d, isnt it?.
+
+###Transmitter setup
+
+You should adjust (normal or reverse) on your transmitter so sticks correspond to below:
+
+In reciever tab:
+* Throttle stick push away - increased value
+* Yaw (Rudder) stick right - increased value
+* Pitch (Elevator) stick push away - increased value
+* Roll (Ailerons) stick right - increased value
+
+Also use subtrim to get center value of 1500us and use travel adjustment to get at lowest value 1000us and highest 2000us when moving sticks.
+
+
+### Motors
+
+After this follow to the Motors tab, rock your plane and notice what levels are moving depending on PITCH, ROLL and YAW angles. You can remember it or write it down. ROLL - 4,5; PITCH - 3, YAW - 6.
+
+
+
+Turn on your transmitter, switch to the Angle or Horizon flight mode and follow the Servos tab.
+
+### Servo setup
+
+
+
+Here you need to be very attentive. In this tab you set up endpoints, neutral, rates and reverse for stabilization modes. Servo numbering in the tab starts from 0!
+
+For the Elevator, tilt the plane's tail down, and the Elevator should go down. If the elevator goes up, then you need to set the Rate (the right-most drop down list) Servo 2 with negative sign.
+
+Tilt the left wing down. Left Aileron should go down and right one should go up. If it is not so, then put negative Rate values for Servo 3 and Servo 4 (if your ailerons are connected by means of Y-cable, than you can change the settings for only one Servo or connect the Y-cable to other Servo out).
+
+Turn the tail to the left, and the Rudder should go to the left. Otherwise switch the Servo 5 Rate to negative.
+
+After this stick movement should also move servos the correct way. (General rules: Elevator stick down - elevator goes up, Aileron stick to the left - left aileron is up, right aileron is down, Rudder stick to the left, rudder goes to the left)
+
+Attention! all the endpoints, neutrals, trimmers should be done on this tab, not in transmitter!
+
+### Recommended power layout
+
+To prevent brownout its wise to power servos with one BEC and the flight controller + other equipment with another BEC.
+
+This is one way to accomplish it:
+
+Glued a new row of pins onto the case of the flightcontroller, the must be connected together. (See the bottom of pins)
+
+All servos and ESC is connected to flightcontroller, except positive wire which goes to the new row. (This line gets its power from the BEC in the ESC)
+
+Another external BEC is connected at random positive and negativ pin on flight controller to power it, the receiver and GPS.
+
+This way if one servo get stuck and draws alot of amps you shouldnt risk your flight system to power down.
+
+
+
+
+### PID/PIFF Settings
+The default PID settings that are set using Presets tab are a good starting point but usually you may need to chnge them if you want yor plane to fly really stable.
+Here are my PIFF settings for a small 800mm flying wing - EPP Rainbow.
+
+
+DigitalEntity wrote about the PIFF controller setup procedure the following, I have nothing to add:
+
+If you have inflight adjustments - this will be easier for you. I tuned like this:
+
+0) Fly ANGLE mode, LOS, calm day. Started with these PIFFs: P=5, I=10, D/FF = 20
+
+1) Give hard roll command, watch how plane executes it. It should be smooth from start to finish, without (or with minimal) oscillation at the end of the roll, without much wobble. If it oscillates at the end of maneuver - reduce FF; if it starts fast, then slows down and after a moment pushes it further - that's indication of too low FF
+
+2) Repeat for pitch
+
+3) I dialed up FF as much as possible until I started to get oscillations at the end of maneuver and backed about 20%
+
+4) If it doesn't reach commanded angle - increase I-gain (best verifiable with OSD indication for roll/pitch angles
+
+5) Wait for some wind (to get some turbulence)
+
+6) Dial up P to fight turbulence better. In ANGLE mode I+FF will keep aircraft nice and level, but P will improve turbulence handling. WARNING - increasing P will cause much more active servos and reduce their life expectancy.
+
+### OSD setup
+I prefer using MW-OSD. It supports many protocols and also has native support of iNAV. Say you have a minimOSD or micro minimOSD. So first you need to upload [MWOSD](http://www.mwosd.com/) firmware to your minimOSD. You can find pretty straight forward install guide following the [link](https://github.com/ShikOfTheRa/scarab-osd/blob/master/OTHER/DOCUMENTATION/FirmwareFlashing.md). As usual you use Arduino IDE for global OSD config. All changes are done in the Config.h file. In our case we need to leave uncommented the following lines:
+
+OSD HARDWARE settings:
+
+`#define MINIMOSD`
+
+CONTROLLER SOFTWARE
+
+`#define iNAV`
+
+AIRCRAFT/INSTALLATION TYPE settings
+
+`#define FIXEDWING`
+
+Usualy it is enough.
+
+You may enable also rather helpful '#define MAPMODE' under FEATURES that allows you to see the map indication of relative positions of home and aircraft.
+
+Configure config.h allowing LTM if you want to share USART1 with your telemetry system, as explained above.
+
+All other settings are done in MWOSD configurator. Everything you need is to select the font you like, OSD indicators' positions. As iNAV takes care of voltage/current/rssi monitoring you'll need to ask the MWOSD to take these values from the FC (see the fig)
+
+The screenshot of the MWOSD configuration is shown below:
+
+
+Watch this demo video of the iNAV flight and RTH function:
+
+[](https://www.youtube.com/watch?v=GYd7mxGxNL8)
+
+Good luck!
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/quickstart/Multirotor-guide.md b/versioned_docs/version-4.1.0/quickstart/Multirotor-guide.md
new file mode 100644
index 0000000..6de39e9
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/Multirotor-guide.md
@@ -0,0 +1,49 @@
+---
+title: Multirotor Guide
+sidebar_position: 3
+---
+
+## 0. Setup hardware
+
+* Balance props and motors, install FC on a vibration-damping mount if possible.
+
+## 1. Getting your flight controller ready.
+
+* Download latest configurator from [here](https://github.com/iNavFlight/inav-configurator/releases)
+* Flash newest iNav with full chip erase option selected
+* Do the advanced 6-point [sensor calibration](./Sensor-calibration.md)
+* Select your Mixer. Most common ones are already available as presets. For exotic setups, see [Custom mixes for exotic setups](../advanced/Custom-mixes-for-exotic-setups.md); if you don't do this, you will not see any motors in the motors tab.
+* Be sure the model moves on the configurator as it is moving on the bench. If not, adjust board alignment from the Configuration tab
+* If you have a magnetometer, you may need to attach a battery for magnetometer calibration. Rotate the quadcopter 360 degrees on all 3 axes.
+
+## 2. Configure your TX
+
+No special mixers have to be applied on the TX. Just bypass all the channels as they are to the FC.
+Set trim on your TX to zero. Use subtrim to adjust your TX midpoints to be precisely 1500 when Roll/Pitch/Yaw sticks are centered. You can check the input values in the Receiver tab in iNav configurator. All values should be in the range 1000-2000uS.
+
+## 3. Tune your copter's Pitch/Roll/Yaw/Level PIDs and other values
+
+Many presets are available on the specific configurator tab and they mostly represent a good starting point.
+Be sure to load the correct present and double check the applied configuration.
+
+[Default values for different type of aircrafts](./Default-values-for-different-type-of-aircrafts.md)
+
+## 4. Trim copter to level flight
+DO NOT USE TRIM on your Transmitter to stop your copter drifting. Use board alignment settings or accelerometer trim stick combos.
+You can use RX stick combination to trim the quadcopter: [Controls](https://github.com/iNavFlight/inav/blob/master/docs/Controls.md)
+
+## 5. Check your sensors
+* If any, be sure the baro readings are correct and be sure the barometer is shielded with some foam to avoid to be disturbed by the air pushed on it by the propellers.
+* If a magnetometer is in use, be sure to check it is providing the correct heading information. After having calibrated it (outside, far away from buildings and parking lots) be sure that when you point the multirotor nose to the north the heading is 0 and it still is around 0 even if you tilt the multirotor a bit on pitch and roll axis. Be also sure that the magnetometer is placed reasonably away from interference sources (such as power wires).
+Having a good compass reading is **crucial** for navigation function to work correctly.
+
+## 6. Setup and verify failsafe on TX and iNav
+[Guide for setting up failsafe](../features/Failsafe.md)
+
+## 7. Determine and set hover throttle
+To let the altitude hold controller work correctly, you need to input your hover throttle (the throttle you need to apply to make the multirotor hover) into the **nav_mc_hover_thr** CLI variable or just set it via the configurator configuration tab.
+If your copter jumps/rises when you activate altitude hold, reduce your nav_mc_hover_thr a bit. If your copter falls, increase it a bit; fine tune until there is no jump or fall when activating altitude hold.
+
+
+## 8. Get to know the CLI values.
+iNav offers a lot of customization through CLI variables. It is strongly recommended to read through [iNav CLI variables](../advanced/iNav-CLI-variables.md) and [available CLI variables](https://github.com/iNavFlight/inav/blob/master/docs/Cli.md)
diff --git a/versioned_docs/version-4.1.0/quickstart/Sensor-calibration.md b/versioned_docs/version-4.1.0/quickstart/Sensor-calibration.md
new file mode 100644
index 0000000..8bf1660
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/Sensor-calibration.md
@@ -0,0 +1,97 @@
+---
+title: Sensor Calibration
+---
+
+**Important:** iNav requires you to follow the accelerometer calibration steps below. These steps are different to Cleanflight & Betaflight. So don't skip reading this section, **it's vitally important**.
+
+Modern accelerometer sensors are precise, but they require calibration if we want accurate measurements.
+
+The sensors on your flight controller might be biased and gains on different axes might be different. iNav uses an advanced 6-point calibration to take care of all irregularities your flight controller sensors might have.
+
+## Accelerometer calibration steps
+
+Unlike the simple level calibration used in cleanflight & betaflight INAV uses a "6 point accelerometer calibration" process.
+
+You may find this easier to do more accurately prior to installing the flight controller in your model and this procedure MUST be done referenced to the marked orientation on the board.
+
+See "calibration procedure" below:
+
+**Note:** If the flight controller is mounted in another angle or upside down, do the calibration steps with the flight controller pointing as shown in the pictures, not based on the orientation of the quad or fixed wing model itself, otherwise calibration won´t work.
+
+0. Connect the model to the "Configurator" software, select the "Setup" tab.
+
+1. Place the model level (_position 1 as shown in the picture_) and press the "Calibrate Accelerometer" button. Advanced calibration has been activated and has recorded the first data point.
+
+2. Place model on all sides in sequence (_positions 2 to 6_): on its back, right side, nose up, left side, nose down. Press "Calibrate Accelerometer" button for in each position. The advanced calibration algorithm will record 2nd to 6th data points.
+
+3. After all 6 positions have been recorded advanced calibration will calculate offsets and gains, then store them in the flight controllers EEPROM. Accelerometer calibration complete (YAY!).
+
+4. Use the CLI tab to verify that **accgain_x**, **accgain_y** and **accgain_z** parameters are **NOT 4096**. If they are, algorithm failed to converge, calibration failed and needs to be repeated. In addition, **acczero_x**, **acczero_y**, **acczero_z**, should **not be 0** any more.
+
+There is no need to place the model perfectly aligned, the algorithm does not care about exact positions as long as they are close to 90 degree apart and copter is stationary in every position.
+
+## Board Orientation and Level Calibration
+
+If you have your board rotated in any way, change board alignment to match (_see the configuration tab in the iNav configurator_).
+
+You can verify the correct board orientation by banking your your aircraft left and right, forward and back and rotate left and right. In all examples the 3D model image in configurator **must** move accordingly.
+
+Accelerometer calibration **does not** record a leveled model.
+
+For level flight and navigation features to work you need to trim the firmware to level flight using "Board Alignment" on the "Configuration" tab. The readings should show close to 0.0 on all axis when the aircraft is laying flat.
+
+To trim out unleveled flight / drift using stick commands is really useful.
+
+**Note:** If using CLI to set up board alignment unlike Cleanflight firmware board alignment angles are set in degrees*10, so if you need to trim your board 1.5 degrees you should enter "15".
+
+## Compass Calibration
+
+Accurately setting up the compass is vital because it is the primary source of heading information.
+
+Without an accurate heading the drone will not move in the correct direction in autopilot modes (POSHOLD, RTH, Waypoint). This can lead to circling (aka “toilet-bowling”) or even fly-aways.
+
+The magnetometer (_basically a compass_) measures magnetic field strength so it should be placed a**way from any sources of magnetic interference** - power wires, ESCs, motors, beepers, metal parts of the frame, video transmitters, Llamas & so on...
+
+The best way is to place the compass on a mast along with GPS module. When an external compass is used remember to set correct "align_mag", see the [iNav CLI variables](https://github.com/iNavFlight/inav/blob/master/docs/Cli.md) for more information. Compass must be mounted parallel to f/c. If not please follow the guide in [setting-up-the-compass-alignment](./GPS--and-Compass-setup.md#setting-up-the-compass-alignment).
+
+When using an external magnetometer 9/10 times you need to physically remove (_remove chip from board or cut a trace_) the internal one if you have on.
+
+You can't use two identical chips/magnetometers on the same I2C bus. The 1/10 time you dont need to physically remove your internal mag is when you have different magnetometers on the flight controller and the external one. Example you cannot use two HMC5883L magnetometers.
+
+### Performing the Calibration
+
+Calibrate with flight battery powering up the aircraft.
+
+Press "Calibrate Magnetometer" button.
+
+You have 30 seconds to hold the copter in the air and rotate it so that each side (front, back, left, right, top and bottom) points down towards the earth. However the algorithm is smart enough to calculate the proper calibration values even if you simply wave the copter in the air for 30 seconds after pressing "Calibrate Magnetometer" button.
+
+### Compass calibration using stick functions
+Calibrating Mag/Compass without the need to be connected to a computer can extremely convenient while out in the field. The [Controls.md](https://github.com/iNavFlight/inav/blob/master/docs/Controls.md) wiki describes the various capabilities of adjusting the craft's controls using the TX sticks. As described in this document, calibrate the compass by moving the left stick up and to the right while at the same time, move the right stick down and to the center. The flight controller will sound two quick beeps indicating the start of the calibration. Move the craft as indicated in the paragraph above. After 30 seconds, the flight controller will sound a single beep indicating the completion of the process.
+
+### Verifying that compass is calibrated properly
+
+0. Use the CLI to verify that **magzero_x**, **magzero_y** and **magzero_z** parameters are **NOT 0** any more. If they are, algorithm failed to converge, calibration failed and needs to be repeated.
+1. Connect the copter to iNAV Configurator and observe the attitude values on the "Setup" screen (values of Heading, Pitch and Roll). Point your models nose North and verify that heading is reading 0 deg. Tilt the copter 30 degrees forward, right, left and back while observing the Heading value. Value of 0 deg shouldn't change more than several degrees. Repeat the process with models nose pointing East (heading=90 deg), South (heading=180 deg), West (heading=270 deg).
+
+If the value is incorrect when copter is level, you likely don't have **align_mag** CLI variable set to proper compass alignment value. If heading value is correct when copter is level but drifts when you tilt the model, then your should re-calibrate the compass.
+
+2. Also, remember to set magnetic declination to a proper value on the "Configuration" screen.
+The magnetic declination of your specific location can be found here: (magnetic-declination.com)[http://magnetic-declination.com].
+
+If your magnetic declination readings are e.g. +3° 34' , the value entered in the iNav configurator is 3.34 (_3,34 in some locales_). In the CLI, the same effect would be `set mag_declination = 334`. For west declination, use a minus value, e.g. for 1° 32' W, `set mag_declination = -132`. In all cases (both CLI and GUI), the least significant digits are **minutes**, not decimal degrees.
+
+Since iNav 1.2, on non-F1 targets, one can use an automatic declination setting, which is more than accurate enough for iNav. `set inav_auto_mag_decl = ON`.
+
+
+## Gyroscope Calibration
+
+Gyroscope calibration, or rather bias recording, is performed on every startup. **Your model should be stationary while powering up. **
+
+With most models, connecting batteries while keeping the craft still can be difficult, simply ensure the craft is placed on the ground (or somewhere solid and still) for 5 seconds as soon as possible after powering up. Gyro auto calibration will only run when no motion is detected
+
+**Note:** Under normal conditions there is no need for a manual calibration procedure, but if required this can be performed via stick commands.
+
+## Backup and Restore the Settings
+
+To avoid going through full calibration after resetting the configuration new CLI settings are introduced to get and set accelerometer offsets and gains: **acczero_x**, **acczero_y**, **acczero_z**, **accgain_x**, **accgain_y**, **accgain_z**. The same applies to **magzero_x**, **magzero_y** and **magzero_z**.
diff --git a/versioned_docs/version-4.1.0/quickstart/Something-is-disabled----Reasons.md b/versioned_docs/version-4.1.0/quickstart/Something-is-disabled----Reasons.md
new file mode 100644
index 0000000..a5c4da3
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/Something-is-disabled----Reasons.md
@@ -0,0 +1,105 @@
+---
+title: Something is disabled
+---
+
+## Something is disabled
+
+iNav may fail to perform some action as expected, typically arming or engaging waypoints. This articles documents the reasons for some of these events.
+
+## Arming disabled reasons
+
+iNav will refuse to arm for the following reasons (e.g. from cli `status`):
+
+| Reason (CLI Mnemonic) | Bit Mask (Hex) | Explanation |
+| ------ | ----- | ----------- |
+| `FS` | `00000080` | The RX is not recognised as providing a valid signal |
+| `ANGLE` | `00000100` | The vehicle is not level as defined by the CLI `small_angle` setting |
+| `CAL` | `00000200` | The pre-arm sensor calibration has not completed. The barometer is somewhat susceptible to lengthy calibration, which may be mitigated by the CLI setting `baro_cal_tolerance`, e.g. `set baro_cal_tolerance = 500` (find a suitable value by experimentation). |
+| `OVRLD` | `00000400` | The CPU load is excessive. May be caused by too an aggressive loop time setting. |
+| `NAV` | `00000800` | Where the CLI setting `nav_extra_arming_safety = ON` is used, this may be caused by reasons shown in the [table below](#navigation-unsafe-reasons) |
+| `COMPASS` | `00001000` | The compass is not calibrated. Perform the calibration procedure |
+| `ACC` | `00002000` | The accelerometer is not calibrated. Perform the 6 point calibration procedure |
+| `ARMSW` | `00004000` | The arm switch was engaged as the FC booted |
+| `HWFAIL` | `00008000`| A required hardware device has failed / is not recognised (e.g. GPS, Compass, Baro) |
+| `BOXFS` | `00010000` | A failsafe switch is engaged |
+| `KILLSW` | `00020000` | A kill switch is engaged |
+| `RX` | `00040000` | The RC link is not detected (RX not detected) |
+| `THR` | `00080000` | The throttle setting is not a minimum |
+| `CLI` | `00100000` | The CLI is active (note: you will always /unavoidably see this when in the CLI) |
+| `CMS` | `00200000` | The CMS menu is active |
+| `OSD` | `00400000` | The OSD menu is active |
+| `ROLL/PITCH` | `00800000` | Roll and/or pitch is not centred |
+| `AUTOTRIM` | `01000000` | Servo autotrim is engaged |
+| `OOM ` | `02000000` | The FC is out of memory |
+| `SETTINGFAIL` | `04000000` | A CLI setting is out of range. The erroneous setting should be indicated in a CLI `dump`. If you can't then reset the offending setting, reflash with full chip erase and reapplying settings from scratch may help.|
+| `PWMOUT` | `08000000` | PWM output error. Motor or servo output initialisation failed. |
+| `NOPREARM` | `10000000` | PREARM is enabled and timed out |
+| `DSHOTBEEPER` | `20000000` | DSHOTBEEPER is enabled and is active |
+
+Note: On older processors, just the bitmask is shown, which can be decoded by the numeric values in the table. A numeric value may be a combination of conditions, for example:
+
+```
+0x184000 = 00100000 + 00080000 + 00004000 (CLI active, throttle not at minimum, arm engaged)
+```
+The values are correct for iNav 4.0.0 as of 2021-12.
+
+### Navigation Unsafe reasons
+
+Requires that a navigation mode (which includes failsafe RTH) is configured
+
+| Navigation Unsafe |
+| ------------------ |
+| The GPS has insufficient satellites (this is checked even if you disable GPS, but have a NAV mode configured in Modes tab) |
+| A navigation switch is engaged (e.g.PH, WP, RTH) |
+| First WP distance exceeded |
+| Satellite quality is unacceptable: EPH/EPV > 10m (note the limit in the CLI `inav_max_eph_epv` is in cm, default 1000) |
+| The WP mission contains an invalid JUMP sequence |
+| The first waypoint is beyond the distance defined by the CLI setting `nav_wp_safe_distance`. |
+
+* `nav_wp_safe_distance` : The default is 100m (10000cm, as the value is entered in cm), 0 disables this check.
+
+ ```
+ # get nav_wp_safe_distance
+ nav_wp_safe_distance = 10000
+ Allowed range: 0 - 65000
+ ```
+* Invalid JUMP.
+ - First item can't be JUMP (can't calculate 1st WP distance, impossible for backward jumps)
+ - Can't jump to immediately adjacent WPs (pointless)
+ - Can't jump beyond WP list (undefined behaviour)
+ - Can only jump to geo-referenced WPs (otherwise, undefined behaviour)
+
+## Waypoints will not execute
+
+The pilot *thinks* that they have loaded a waypoint mission, but the mission will not execute when the assigned switch is engaged.
+
+* No mission is actually loaded into the FC. Note that waypints have to be in volatile memory (that is cleared on powercycle), not in EEPROM. If waypoints have been saved to EEPROM it is necessary to restore the WPs to volatile memory before the mission can be executed.
+
+* The Fixed Wing aircraft is in `MANUAL` / `PASSTHROUGH` mode.
+
+* The craft is currently executing RTH
+
+## RTH fails to engage
+
+* The GPS signal is degraded (eph / epv exceed, CLI setting `inav_max_eph_epv`)
+
+## Diagnostics
+
+Diagnosing arming failure and WP execution failure often requires the use of a tool external to the FC; the following may help:
+
+* The iNav configurator displays reasons for arming failure
+* A blackbox log provides post event diagnostics
+* The iNav CLI (available from a terminal, the configurator and many ground-stations) displays arming disabled reasons:
+
+ ```
+ # status
+ ...
+ Arming disabled flags: NAV HWFAIL RX CLI
+ ```
+* A ground station may provide diagnostics, for example [mwp](https://github.com/stronnag/mwptools) provides an 'Arming Disabled' alert icon with 'popover' description / explanation, mission upload validation checks and 'first WP distance' exceeded warnings.
+* Video explanation via https://quadmeup.com/troubleshooting-inav-why-inav-is-not-arming/
+* **Your favourite diagnostic tool / technique goes here**
+
+## Postscript
+
+For 'Navigation is unsafe', you may, of course `set nav_extra_arming_safety = ALLOW_BYPASS`; however there is a clue is in the name. There is also `nav_extra_arming_safety = OFF`, which is not recommended. At least with `ALLOW_BYPASS` you know you've done something potentially dangerous.
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/quickstart/TROUBLESHOOTING.md b/versioned_docs/version-4.1.0/quickstart/TROUBLESHOOTING.md
new file mode 100644
index 0000000..c8a88fc
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/TROUBLESHOOTING.md
@@ -0,0 +1,24 @@
+---
+title: Troubleshooting
+---
+
+## UAV won't arm
+1. Verify that it is level. You can bypass this requirement by typing "set Small_angle=180" then "save" in the CLI.
+2. Run-time calibration not completed. Put the UAV flat and immobile on a surface and wait 10 seconds.
+3. GPS doesn't have a lock. Move to an area with no sky obstruction or interference and wait. If lock still doesn't happen after a minute, relocate your GPS far from on-board electrics or shield the bottom part with [copper tape](https://www.ebay.com/itm/Copper-Foil-Tape-2-X-10ft-EMI-Conductive-Adhesive-Ship-from-USA/152118807659?hash=item236afccc6b:g:q2IAAOSwpdpVaIrt:rk:3:pf:0).
+4. Compass not calibrated. Start compass calibration from configurator or stick control and, within 30 seconds, face all 6 face of the UAV to the ground.
+If none of the above work, verify in your goggles or CLI "status" command the cause. Hardware malfunction might be the cause.
+
+## UAV shakes
+1. Verify that frame & motors are solidly bolted together, on an H-frame double up the bottom plate.
+2. lower P on Roll and Pitch from configurator, adjustments or stick control
+3. drop PID to 1,1,1 for Pitch and Roll and do a PID tuning from scrartch https://youtu.be/4sjXJ5HoU_c or https://youtu.be/ehyXLsvaEhw
+
+## POS HOLD drifting
+(moving in circle a.k.a Toilet bowling or running away)
+1. SETTINGS: go inside configuration and verify that your MAG alignment is [set properly](https://github.com/iNavFlight/inav/wiki/GPS--and-Compass-setup)
+2. CALIBRATION: redo MAG calibration
+3. TEST MAG INSULATION: on the bench, add headings to OSD then props off, connect battery, motor tabs rev up your motors and see in your goggles if the headings changes. If it changes you have bad insulation so move the mag away from your quad's electricals or apply copper tape between mag and main power lines. If you want to test this with flight condition current, fly your quad outside in ACRO, doing punch-through with no yaw movement.
+
+## Transition to ALT HOLD is bad
+1. Get your UAV in a stable hover in ACRO or ANGLE mode, find the amount of throttle required (openTX>Output>Throttle number at the top). Dial this number in configurator>Advanced Tuning tab>Hover Throttle. Note: if the value you find is >1700, your motors are underpowered to lift your quad, consider different props and motor combination.
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/quickstart/Upgrading-from-an-older-version-of-INAV-to-the-current-version.md b/versioned_docs/version-4.1.0/quickstart/Upgrading-from-an-older-version-of-INAV-to-the-current-version.md
new file mode 100644
index 0000000..e0d47ca
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/Upgrading-from-an-older-version-of-INAV-to-the-current-version.md
@@ -0,0 +1,173 @@
+---
+title: Upgrading From An Older Version of INAV
+---
+
+
+
+This page is intended to make it easy for you to upgrade your INAV older version to the current INAV version. The process is straightforward as long as you follow the instructions detailed here.
+
+**The current version of INAV is 2.6** (as the time this document was been last updated).
+
+> Note that INAV version numbers has a pattern: There are three numbers separated by dots (2.6.0).
+> - The first number is the major version. This number changes only when BIG changes are made on INAV.
+> - The second number is the minor version. This number changes only when SMALL changes are made on INAV.
+> - The third number is the revision number. This number changes only when some bug is fixed on INAV and no new functionality is added.
+>
+> To determine the version, only the first two numbers are important.
+
+In general, all comes to the following steps:
+* Get the latest configurator.
+* Get the current settings from your flight controller board
+* Determine the current version and the TARGET of INAV firmware flashed to your flight controller board.
+* Check which values has changed over the newer versions, and adjust your settings as necessary
+* Flash the latest INAV firmware on your flight controller board
+* Paste the adjusted settings on the Command Line Interface (CLI)
+* Upload your preferred font to the OSD chip
+* Take additional upgrading actions (if needed)
+
+**Note about F1 and F3 microcontrollers**: Flight controller boards with STM32**F1** chips (like NAZE32 or CC3D) will only work up to the 1.7.3 version. Flight controller boards with STM32**F3** chips (like SPRACINGF3 or OMNIBUS) will only work up to the 2.6.0 version. We do recommend that you use a F4, F7 or H7 based Flight Controller board for new setups.
+
+## Get the latest INAV configurator
+
+Download and install (on your computer) the latest configurator at the [INAV Configurator Releases page](https://github.com/iNavFlight/inav-configurator/releases).
+
+## Get all the current settings from your flight controller board
+
+1. Open the configurator program on your computer.
+2. Connect the flight controller board to the USB port on PC, then click connect button on the configurator.
+3. Go to the CLI tab and type `diff all`. It should return a big text with all your settings.
+4. Copy this text and paste it on your favorite text editor (like Notepad), then save it as a backup.
+
+## Determine your current INAV firmware version and target
+
+On your settings file, just at the beginning, you should have something like this:
+
+```
+# version
+# INAV/MATEKF405 2.2.1 Jul 3 2019 / 22:31:06 (a6d847482)
+# GCC-8.2.1 20181213 (release) [gcc-8-branch revision 267074]
+```
+
+Take note of the TARGET which is just after the `INAV/` and VERSION number which is just after the target
+(In this case, TARGET is **MATEKF405** and VERSION is **2.2.1**)
+
+## Check which values has changed over the newer versions, and adjust as necessary
+
+Now it's time to change your settings file so it becomes compatible with the latest INAV firmware. Follow your specific version instructions.
+
+### From 2.5 to 2.6
+* If you are using Home Offset feature (lines with `nav_rth_home_offset_`), then you should remove this lines and use the `safehome` function instead.
+* If you are using Override Motor Stop feature (`nav_overrides_motor_stop` setting), you need to change the value of this setting by one of the new possible values, which are `OFF`, `AUTO_ONLY` or `ALL_NAV`.
+* Remove this deprecated settings if present: `gyro_notch1_hz`, `gyro_notch2_hz`, `gyro_notch1_cutoff`, `gyro_notch2_cutoff`, `use_dterm_fir_filter`, `dterm_setpoint_weight`, `dterm_notch_hz`, `dterm_notch_cutoff`, `mc_iterm_relax_type`
+
+### From 2.4 to 2.6
+* `aux` lines needs to be changed. Use [this tool](https://box2perm.vercel.app/) to migrate your `aux` lines.
+* Replace `yaw_motor_direction` by `motor_direction_inverted` if present
+* Replace `telemetry_uart_unidir` by `telemetry_halfduplex` if present
+* Remove this deprecated settings if present: `dyn_notch_width_percent`, `dyn_notch_range`, `dyn_notch_q`, `dyn_notch_min_hz`, `rpm_dterm_filter_enabled`, `dterm_gyro_harmonic`, `rpm_dterm_min_hz`, `rpm_dterm_q`, `vtx_freq`, `gyro_notch1_hz`, `gyro_notch2_hz`, `gyro_notch1_cutoff`, `gyro_notch2_cutoff`, `use_dterm_fir_filter`, `dterm_setpoint_weight`, `dterm_notch_hz`, `dterm_notch_cutoff`, `mc_iterm_relax_type`
+* If you are using Home Offset feature (lines with `nav_rth_home_offset_`), then you should remove this lines and use the `safehome` function instead.
+* If you are using Override Motor Stop feature (`nav_overrides_motor_stop` setting), you need to change the value of this setting by one of the new possible values, which are `OFF`, `AUTO_ONLY` or `ALL_NAV`.
+
+### From 2.2 or 2.3 to 2.6
+* Find `min_throttle` line, and replace it by `throttle_idle`, setting the percentage of the idle throttle. The default is 15.
+* `aux` lines needs to be changed. Use [this tool](https://box2perm.vercel.app/) to migrate your `aux` lines.
+* Replace `yaw_motor_direction` by `motor_direction_inverted` if present
+* Replace `telemetry_uart_unidir` by `telemetry_halfduplex` if present
+* Remove this deprecated settings if present: `dyn_notch_width_percent`, `dyn_notch_range`, `dyn_notch_q`, `dyn_notch_min_hz`, `rpm_dterm_filter_enabled`, `dterm_gyro_harmonic`, `rpm_dterm_min_hz`, `rpm_dterm_q`, `vtx_freq`, `gyro_notch1_hz`, `gyro_notch2_hz`, `gyro_notch1_cutoff`, `gyro_notch2_cutoff`, `use_dterm_fir_filter`, `dterm_setpoint_weight`, `dterm_notch_hz`, `dterm_notch_cutoff`, `mc_iterm_relax_type`
+
+### From 2.0 or 2.1 to 2.6
+* Find `min_throttle` line, and replace it by `throttle_idle`, setting the percentage of the idle throttle. The default is 15.
+* If you are upgrading a multi rotor, POS XY PID I and D have now specific settings, respectively `nav_mc_pos_deceleration_time` and `nav_mc_pos_expo` . So if you don't use defaults, when restoring, move yours to the new settings.
+* `aux` lines needs to be changed. Use [this tool](https://box2perm.vercel.app/) to migrate your `aux` lines.
+* Replace `yaw_motor_direction` by `motor_direction_inverted` if present
+* Replace `telemetry_uart_unidir` by `telemetry_halfduplex` if present
+* Remove this deprecated setting if present: `vtx_freq`, `gyro_notch1_hz`, `gyro_notch2_hz`, `gyro_notch1_cutoff`, `gyro_notch2_cutoff`, `use_dterm_fir_filter`, `dterm_setpoint_weight`, `dterm_notch_hz`, `dterm_notch_cutoff`, `mc_iterm_relax_type`
+
+### From 1.9 to 2.6
+* Find `min_throttle` line, and replace it by `throttle_idle`, setting the percentage of the idle throttle. The default is 15.
+* If you are upgrading a multi rotor, POS XY PID I and D have now specific settings, respectively `nav_mc_pos_deceleration_time` and `nav_mc_pos_expo` . So if you don't use defaults, when restoring, move yours to the new settings.
+* Delete all lines starting with: mixer acczero accgain magzero osd.
+* `aux` lines needs to be changed. Use [this tool](https://box2perm.vercel.app/) to migrate your `aux` lines.
+* Replace `yaw_motor_direction` by `motor_direction_inverted` if present
+* Replace `telemetry_uart_unidir` by `telemetry_halfduplex` if present
+* Remove this deprecated setting if present: `vtx_freq`
+
+### From 1.7 or 1.8 to 2.6
+* Find `min_throttle` line, and replace it by `throttle_idle`, setting the percentage of the idle throttle. The default is 15.
+* If you are upgrading a multi rotor, POS XY PID I and D have now specific settings, respectively `nav_mc_pos_deceleration_time` and `nav_mc_pos_expo` . So if you don't use defaults, when restoring, move yours to the new settings.
+* Delete all lines starting with: mixer acczero accgain magzero osd.
+* Find `vbat_scale`, `vbat_max_cell_voltage`, `vbat_warning_cell_voltage` and `vbat_min_cell_voltage` values on your settings, and multiply their values by 10.
+* `aux` lines needs to be changed. Use [this tool](https://box2perm.vercel.app/) to migrate your `aux` lines.
+* Replace `yaw_motor_direction` by `motor_direction_inverted` if present
+* Replace `telemetry_uart_unidir` by `telemetry_halfduplex` if present
+* Remove this deprecated setting if present: `vtx_freq`
+
+### From 1.6 to 2.6
+* Find `min_throttle` line, and replace it by `throttle_idle`, setting the percentage of the idle throttle. The default is 15.
+* If you are upgrading a multi rotor, POS XY PID I and D have now specific settings, respectively `nav_mc_pos_deceleration_time` and `nav_mc_pos_expo` . So if you don't use defaults, when restoring, move yours to the new settings.
+* Delete all lines starting with: mixer acczero accgain magzero osd.
+* Find `vbat_scale`, `vbat_max_cell_voltage`, `vbat_warning_cell_voltage` and `vbat_min_cell_voltage` values on your settings, and multiply their values by 10.
+* Find `mag_hold_rate_limit` and replace by `heading_hold_rate_limit` (renamed parameter).
+* Find `nav_max_speed` and replace by `nav_auto_speed` (renamed parameter).
+* Find `nav_max_climb_rate` and replace by `nav_auto_climb_rate` (renamed parameter).
+* Remove this deprecated settinsg if present: `vtx_freq`, `nav_fw_roll2pitch`
+* `aux` lines needs to be changed. Use [this tool](https://box2perm.vercel.app/) to migrate your `aux` lines.
+* Replace `yaw_motor_direction` by `motor_direction_inverted` if present
+* Replace `telemetry_uart_unidir` by `telemetry_halfduplex` if present
+* Find all lines starting with `servo`, and remove the fifth and the sixth arguments of the parameter.
+
+Example: `servo 3 1070 1950 1500 90 90 -80 -1`
+
+Will become: `servo 3 1070 1950 1500 -80 -1`
+
+### From 1.5 or earlier versions
+
+Your version is A LOT outdated. We really recommend you to set everything up from scratch. Your current settings will not be as much as useful. But don't worry, INAV became much easier to set up since this version.
+
+## Flash the lastest INAV firmware to your board
+Now it's time to flash the lastest INAV firmware to your flight controller board..
+* On INAV Configurator, go to the "Firmware Flasher" tab.
+* Select the proper TARGET of the flight controller board.
+* Make sure that the "Full Erase" option is ENABLED.
+* Click "Load Firmware (Online)" button, and then after it loads the online firmware, click "Flash Firmware" button.
+* Wait for the completion of the process.
+
+## Paste the adjusted settings on the CLI
+* Click the "Connect" button on INAV configurator.
+* Go to the CLI tab.
+* Copy all the settings text from your adjusted text file and paste on the CLI input text box, then press ENTER.
+* Wait for all the settings to be typed on the output text box.
+* If no errors occurred, Flight controller should save the settings and reboot by itself.
+
+## Upload your preferred font to the OSD chip
+The font file changes between versions! That's why you need to update the font stored on the OSD chip every time you upgrade INAV version in order to OSD work properly.
+* Go to the OSD Tab on the Configurator.
+* In the bottom right corner, there's a "Font" button. Click it.
+* Select the font that best pleases you, and then click "Upload" button.
+* Wait for the process to complete. Flight Controller will reboot automatically.
+
+## If you are upgrading from version 2.5 or earlier
+* If you have a compass, it has to be recalibrated!
+* Do not migrate Multirotor PID and filter settings from previous releases of INAV. Use Multirotor default preset (3"-7") instead and make required changes on top of that
+
+## If you are upgrading from version 1
+There was a big update from 1.9 to 2.0, there's a new mixer framework, a new OSD framework and new calibration scales for accelerometer and magnetometer. For that reason, you'll need to set this up again and the previous settings will not work.
+
+* Go to the Mixer tab and load and apply your desired mixer.
+* Calibrate the accelerometer following the steps in the dedicated tab. Only first two steps need to be made in the right order.
+* Calibration of the magnetometer should be done at the field. The magnetic field indoors can be distorted and led to a bad calibration.
+* Restore manually your OSD layout using the screenshot and upload the font you like using the dedicated button.
+
+## Check if everything is working as it should
+
+* Carefully check all the configuration and check on the bench without installed propellers if everything looks good. In particular, check if the model preview behaves correctly when you are moving your model and check surfaces movements for an airplane.
+* Arming with sticks command is not supported anymore, so if you were using sticks commands for arming, don't forget to add an arming switch in the Modes tab on the configurator.
+
+## Enjoy the lastest INAV version!
+
+If you done everything right, now your aircraft should be flying ok.
+
+INAV adds lots of new features at every new version! This guide helped you to make your aircraft fly with the newer version as good as it was flying before, but now it's time learn all the new tricks that INAV can do!
+Check [this page](../advanced/New-features-over-versions-log.md) to see everything that the newer versions of INAV can do!
+
+Enjoy!
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/quickstart/Welcome-to-INAV,-useful-links-and-products.md b/versioned_docs/version-4.1.0/quickstart/Welcome-to-INAV,-useful-links-and-products.md
new file mode 100644
index 0000000..f6af55b
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/Welcome-to-INAV,-useful-links-and-products.md
@@ -0,0 +1,82 @@
+---
+title: Useful Links and Products
+---
+
+
+
+**Hello everyone and welcome to INAV!**
+
+We hope you will enjoy spending time in the chat (https://t.me/INAVFlight) and the Facebook Group (https://www.facebook.com/groups/INAVOfficial), following the rules of a quiet life, and indeed flying your machines with INAV.
+
+Before asking for help, please check if you can find the solution for your issue here:
+
+1) https://github.com/iNavFlight/inav/wiki
+
+2) https://github.com/iNavFlight/inav/tree/master/docs
+
+Any contribution to the above documentation is, indeed, highly appreciated.
+
+If you find any issues in the flight controller code please feel free to open an issue on our GitHub issue tracker at https://github.com/iNavFlight/inav/issues, if you find an issue with the configurator software open an issue here https://github.com/iNavFlight/inav-configurator/issues
+
+**Going to build a copter or a plane that will run INAV?**
+
+You are very welcome to ask for suggestions and tips in the chat!
+
+Buying from the following links will help in supporting more hardware, debugging and fixing bugs and expanding the functionalities of the flight controller. From every purchase you make, without any additional cost for you, a small commission will be given to INAV developers!
+
+If you are building a **plane**:
+
+https://github.com/iNavFlight/inav/wiki/Fixed-Wing-Guide
+
+## Recommended hardware
+
+### Flight controllers
+* [Matek H743-SLIM](https://inavflight.com/shop/s/bg/1755036)
+* [Speedybee F7 V2](https://inavflight.com/shop/s/bg/1839168)
+* [Matek F722-SE](https://inavflight.com/shop/p/MATEKF722SE)
+* [Matek F765-WSE](https://inavflight.com/shop/s/bg/1890404)
+* [Matek F722-MiniSE](https://inavflight.com/shop/s/bg/1707404)
+
+### Airplane models
+* [AR Wing Pro](https://inavflight.com/shop/s/bg/1756841)
+* [AtomRC Dolphin](https://inavflight.com/shop/s/bg/1758430)
+* [SonicModell Binary](https://inavflight.com/shop/s/bg/1473014)
+* [Volantex Ranger 2000](https://inavflight.com/shop/s/bg/1151700)
+* [Mini AR Wing](https://inavflight.com/shop/s/bg/1341528)
+
+### Radios
+* [Radiomaster TX16S](https://inavflight.com/shop/s/bg/1746075)
+* [FrSky Q X7](https://inavflight.com/shop/s/bg/1196246)
+* [FlySky FS-i6X](https://inavflight.com/shop/s/bg/1090406)
+
+### Long range radio systems
+* [Radiomaster TX16S + TBS Crossfire Starter Set](https://inavflight.com/shop/s/bg/1735618)
+* [ImmersionsRC Ghost](https://inavflight.com/shop/s/bg/1722555)
+* [FrSky R9M 2019 + R9MX](https://inavflight.com/shop/s/bg/1707906)
+
+### GPS & Sensors
+* [Beitian BN180 GPS](https://inavflight.com/shop/p/BN180)
+* [Beitian BN880Q GPS+COMPASS](https://inavflight.com/shop/s/bg/1450469)
+* [Beitian BN880 GPS+COMPASS ](https://inavflight.com/shop/p/BN880)
+* [Matek M8Q-5883](https://inavflight.com/shop/s/bg/1337288)
+* [Matek Lidar+OpFlow board](https://inavflight.com/shop/s/bg/1604930)
+* [Matek Digital Airspeed Sensor](https://inavflight.com/shop/s/bg/1710131)
+* [Benewake TFmini Lidar](https://inavflight.com/shop/s/bg/1449740)
+
+
+### FPV
+* [DJI FPV Goggles](https://inavflight.com/shop/s/bg/1800745)
+* [Caddx Air Unit](https://inavflight.com/shop/s/bg/1546926)
+* [Caddx Vista HD](https://inavflight.com/shop/s/bg/1625165)
+* [Foxeer T-Rex FPV camera](https://inavflight.com/shop/s/bg/1756536)
+* [RunCam Eagle 3 FPV camera](https://inavflight.com/shop/s/bg/1723926)
+* [Eachine Cobra X FPV goggles](https://inavflight.com/shop/s/bg/1778518)
+* [Skyzone SKY04X FPV goggles](https://inavflight.com/shop/s/bg/1755006)
+
+### Other
+* [ViFly ShortSaver 2](https://inavflight.com/shop/s/bg/1788341)
+* [ViFly Finer buzzer](https://inavflight.com/shop/s/bg/1329066)
+
+You can get more suggestions following this [link](https://github.com/iNavFlight/inav/wiki/Welcome-to-INAV,-useful-links-and-products) too.
+
+_Thanks, and happy flying!_
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/quickstart/Why-do-I-have-limited-servo-throw-in-my-airplane.md b/versioned_docs/version-4.1.0/quickstart/Why-do-I-have-limited-servo-throw-in-my-airplane.md
new file mode 100644
index 0000000..4a18191
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/Why-do-I-have-limited-servo-throw-in-my-airplane.md
@@ -0,0 +1,50 @@
+---
+title: Why Do I Have Limited Servo Throws In My Airplane
+---
+
+## Explanation of why you have limited throw in any stabilisation mode. ( Including Rate / Acro )
+
+First basic PIFF controller:
+
+* P-gain will change your servo movement when it sees an error between wanted motion ( deg/s ) and actual motion ( deg/s )
+* I-gain will change your servo movement when it sees an error between wanted motion ( deg/s ) and actual motion ( deg/s ), however I-gain also knows the concept of time, and therefor will contuinue to increase servo movement until actual motion is the same as wanted motion.
+* FF-gain doesnt not care about actual motion, and does only move servos based on wanted motion.
+
+Also Angle mode itself have an P-gain to level the aircraft back to level.
+
+Also an sidenote is that I-gain is suppressed before takeoff and without throttle, EVEN with airmode enable you need to first have had some throttle to see the I-gain working, this is important to know if you want to "bench" test behavior.
+
+Passthrough bypasses all this an moves servos directly.
+
+In other words, the only thing that will limit passthrough servo limits and rates set up in the Servos tab.
+
+## What is stabilisation? And how do you as the pilot control the airplane in a stabilised mode?
+
+In passthrough everything is easy, you move sticks on radio, the FC does some mixing according to which airplane/flying wing you have, and then you move the servos directly.
+
+In stabiliation mode however you dont control the servos at **ALL**. Everything is controlled by actual motion, and wanted motion. When you move the sticks you are commanding motion, example 30deg/s roll.
+
+Then the P-gain will start working, the I-gain will start working and the FF-gain will start working, if tuned properly it will hit the wanted motion.
+
+So what does this have to do with limited servo throws?
+
+1. For actual testing on bench you will need to arm and apply throttle to see how much the servos actual moves in flight.
+
+2:
+
+An typical wing can example manage 500 deg/s, default rate values for INAV is 200deg/s.
+
+QUIZ: You command 100% right roll, which would be 200deg/s. What would happend if it did give you full servo throw?
+
+Yes, it would have hit 500deg/s instead and overshoot target motion.
+
+Sum up:
+
+You dont **need** full servo throw! It all depends how you want to [tune](../advanced/Tune-INAV-PIFF-controller-for-fixedwing.md) your airplane.
+
+IF you want full throw, your rate settings ( deg/s ) should match what your plane is able to do at full servo throw. Then in stabilitation mode you increase your P-gain or FF-gain untill you get full throw on servos.
+
+
+Sidenote: For older firmeware, If you want to calm your airplane in `passthrough` mode, you will need an programmable TX. Program it so when enabling `passthrough` on a switch, the switch also reduce channel range and adds expo.
+
+In modern firmware, with `manual` mode (which replaces `passthrough`), the FC imposes expo and rates.
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/quickstart/YouTube-video-guides.md b/versioned_docs/version-4.1.0/quickstart/YouTube-video-guides.md
new file mode 100644
index 0000000..a6c3294
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/YouTube-video-guides.md
@@ -0,0 +1,25 @@
+---
+title: Link to YouTube video guides.
+---
+
+# Link to YouTube video guides.
+
+* [INAV 3 from flash to flight for multirotor drones](https://youtube.com/playlist?list=PLOUQ8o2_nCLkfcKsWobDLtBNIBzwlwRC8)
+* [INAV Fixed Wing Tuning Guide](https://youtu.be/A45vc4OihgY)
+* [Painless360 iNav playlist](http://www.youtube.com/playlist?list=PLYsWjANuAm4qdXEGFSeUhOZ10-H8YTSnH)
+* [Setting up & Using iNav 2017 by Matthew Ogborne](https://youtu.be/1DCCjPbHl_I?list=PLgoM4-umzSqd0clW-e_A12yKiOpV--3a2)
+* [Backup and restoring](https://www.youtube.com/watch?v=M5haTMW239E&feature=youtu.be)
+* [How to use presets](https://www.youtube.com/watch?v=tOXe_VHxVLg)
+* [Gyroscope and filtering part 1](https://www.youtube.com/watch?v=Bv5ajMgdsno)
+* [Gyroscope and filtering part 2](https://www.youtube.com/watch?v=G_XxKeLL4-k)
+
+* [Gyroscope and filtering part 4](https://www.youtube.com/watch?v=0WTEbQ8hOx4)
+* [INAV Troubleshooting: why INAV is not arming](https://www.youtube.com/watch?v=7MAdgGkBkXs)
+* [INAV Troubleshooting: magnetometer is not working](https://www.youtube.com/watch?v=-zaIE-s8aHQ)
+* [INAV Troubleshooting: not getting full servo throw on flying wing](https://www.youtube.com/watch?v=o2RwTeBbvos)
+* [INAV Troubleshooting: toilet bowling instead of Position Hold](https://www.youtube.com/watch?v=FlEm0-pXNf0)
+* [How to use Autotune](https://youtu.be/UOGfC3pvbWM)
+* [How to use servo autotrim](https://www.youtube.com/watch?v=XW1esQp_RvU)
+* [The most common iNav mistakes](https://youtu.be/fVJYodLimD8)
+* [INAV setup for tracked vehicles](https://youtu.be/9194OzsHOFc)
+* [Betaflight to INAV migration in 22 minutes](https://youtu.be/1hhsqyXeKew)
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/quickstart/_category_.json b/versioned_docs/version-4.1.0/quickstart/_category_.json
new file mode 100644
index 0000000..d49165b
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/_category_.json
@@ -0,0 +1,8 @@
+{
+ "label": "Quickstart",
+ "position": 2,
+ "link": {
+ "type": "generated-index",
+ "description": "Get quickly setup and flying with a basic configuration"
+ }
+ }
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/welcome.md b/versioned_docs/version-4.1.0/welcome.md
new file mode 100644
index 0000000..b04ceb5
--- /dev/null
+++ b/versioned_docs/version-4.1.0/welcome.md
@@ -0,0 +1,20 @@
+---
+title: Welcome!
+sidebar_position: 1
+description: The INAV Docs
+slug: welcome
+---
+
+# Welcome to the Docs
+
+INAV is a flight controller software for a multitude of air and land vehicles such as multirotors, fixed wings, VTOLs, rovers, and submarines.
+The software suite consists of:
+* INAV Firmware - what's flashed on the flight controller
+* INAV Configurator - a graphical desktop tool that allows for configuring and programming the vehicle
+* INAV Lua Widget - an EdgeTX widget that augments the INAV experience
+* INAV Blackbox Tools - a tool to convert and use flight data recorded on the flight controller
+
+## Purpose
+
+This unofficial, community made website is the next evolution for the INAV project's documentation.
+The new documentation aims to consolidate everything INAV in a central and easy to use location.
diff --git a/versioned_sidebars/version-4.1.0-sidebars.json b/versioned_sidebars/version-4.1.0-sidebars.json
new file mode 100644
index 0000000..5f41a72
--- /dev/null
+++ b/versioned_sidebars/version-4.1.0-sidebars.json
@@ -0,0 +1,8 @@
+{
+ "documentationSidebar": [
+ {
+ "type": "autogenerated",
+ "dirName": "."
+ }
+ ]
+}
diff --git a/versions.json b/versions.json
index 0b7dacd..6d73a49 100644
--- a/versions.json
+++ b/versions.json
@@ -1,3 +1,4 @@
[
+ "4.1.0",
"4.0.0"
]
+
+Of course, according to the receiver used you need to use the aproppriate firmware for CC3D - inav_1.6.0_CC3D.hex for parallel PWM or inav_1.6.0_CC3D_PPM1.hex PPM receiver. For more information about CC3D pinout check the [CC3D](https://github.com/iNavFlight/inav/blob/master/docs/Board%20-%20CC3D.md) page
+
+I usually don't like the motor rotation on arm, so I switch on the "Don't spin motors when armed" feature.
+
+The new iNAV firmware has all PWM outputs disable until you switch on the "Enable motor and servo output"
+
+Switch on the GPS feature, and select the protocol.
+
+
+If your GPS receiver have enough satellites visible you'll be able to check the 3D fix in GPS tab
+![3D fix] (http://s8.hostingkartinok.com/uploads/images/2017/02/2db676b5f03d436480919b1cbc945fb5.png)
+
+By default iNav won't arm without GPS fix if the GPS feature is ON. To disable it use CLI: "set nav_extra_arming_safety = OFF". And it is highly recomended to switch it back ON before real flights.
+
+If your receiver connection is other than Parallel PWM Receiver, then you'll be able to setup battery voltage, current, RSSI monitoring. It is very userful. So IMHO a PPM is a must for CC3D FC.
+
+On the Receiver tab set up the channel order and their correspondence to TX sticks movements.
+
+On the Modes tab set up the flight modes according to the position of the AUX channels. For example, if you have a 3pos switch for the AUX1 you can get at minimum the following:
+
+* minimum channel value - do not select any mode - only gyros will work. The hand launch take off in this mode is excellent.
+* middle value - Angle or Horizon.
+* maximum value - RTH. Automatic return home.
+
+
+
+### Failsafe
+
+Check [this link](../features/Failsafe.md for RTH failsafe
+
+Starting from iNav 1.6 the Filesafe feature is very transparent and clear. For the failsafe to work you'll need:
+* Setup the receiver output no signal when your TX is off
+* OR assign the Failsafe mode to one of the channels and force it to trigger when your TX is off
+
+Set the desired Failsafe behavior. I prefer RTH.
+
+
+###Telemetry
+
+Connect your TX line and configure FC as explained above. Nowadays you can use several telemetry systems as [mwptools](https://github.com/stronnag/mwptools), [EZGUI](http://ez-gui.com/), [LTM Telemetry OLED](https://github.com/sppnk/LTM-Telemetry-OLED) and possibly others. The USART port can be shared with a OSD or used only for one of both features. For example, you can fly FPV w/o telemetry (just in your googles) or fly thermal soaring 3rd view w/o OSD. Or have both. Amazing you can do this with a simple cc3d, isnt it?.
+
+###Transmitter setup
+
+You should adjust (normal or reverse) on your transmitter so sticks correspond to below:
+
+In reciever tab:
+* Throttle stick push away - increased value
+* Yaw (Rudder) stick right - increased value
+* Pitch (Elevator) stick push away - increased value
+* Roll (Ailerons) stick right - increased value
+
+Also use subtrim to get center value of 1500us and use travel adjustment to get at lowest value 1000us and highest 2000us when moving sticks.
+
+
+### Motors
+
+After this follow to the Motors tab, rock your plane and notice what levels are moving depending on PITCH, ROLL and YAW angles. You can remember it or write it down. ROLL - 4,5; PITCH - 3, YAW - 6.
+
+
+
+Turn on your transmitter, switch to the Angle or Horizon flight mode and follow the Servos tab.
+
+### Servo setup
+
+
+
+Here you need to be very attentive. In this tab you set up endpoints, neutral, rates and reverse for stabilization modes. Servo numbering in the tab starts from 0!
+
+For the Elevator, tilt the plane's tail down, and the Elevator should go down. If the elevator goes up, then you need to set the Rate (the right-most drop down list) Servo 2 with negative sign.
+
+Tilt the left wing down. Left Aileron should go down and right one should go up. If it is not so, then put negative Rate values for Servo 3 and Servo 4 (if your ailerons are connected by means of Y-cable, than you can change the settings for only one Servo or connect the Y-cable to other Servo out).
+
+Turn the tail to the left, and the Rudder should go to the left. Otherwise switch the Servo 5 Rate to negative.
+
+After this stick movement should also move servos the correct way. (General rules: Elevator stick down - elevator goes up, Aileron stick to the left - left aileron is up, right aileron is down, Rudder stick to the left, rudder goes to the left)
+
+Attention! all the endpoints, neutrals, trimmers should be done on this tab, not in transmitter!
+
+### Recommended power layout
+
+To prevent brownout its wise to power servos with one BEC and the flight controller + other equipment with another BEC.
+
+This is one way to accomplish it:
+
+Glued a new row of pins onto the case of the flightcontroller, the must be connected together. (See the bottom of pins)
+
+All servos and ESC is connected to flightcontroller, except positive wire which goes to the new row. (This line gets its power from the BEC in the ESC)
+
+Another external BEC is connected at random positive and negativ pin on flight controller to power it, the receiver and GPS.
+
+This way if one servo get stuck and draws alot of amps you shouldnt risk your flight system to power down.
+
+
+
+
+### PID/PIFF Settings
+The default PID settings that are set using Presets tab are a good starting point but usually you may need to chnge them if you want yor plane to fly really stable.
+Here are my PIFF settings for a small 800mm flying wing - EPP Rainbow.
+
+
+DigitalEntity wrote about the PIFF controller setup procedure the following, I have nothing to add:
+
+If you have inflight adjustments - this will be easier for you. I tuned like this:
+
+0) Fly ANGLE mode, LOS, calm day. Started with these PIFFs: P=5, I=10, D/FF = 20
+
+1) Give hard roll command, watch how plane executes it. It should be smooth from start to finish, without (or with minimal) oscillation at the end of the roll, without much wobble. If it oscillates at the end of maneuver - reduce FF; if it starts fast, then slows down and after a moment pushes it further - that's indication of too low FF
+
+2) Repeat for pitch
+
+3) I dialed up FF as much as possible until I started to get oscillations at the end of maneuver and backed about 20%
+
+4) If it doesn't reach commanded angle - increase I-gain (best verifiable with OSD indication for roll/pitch angles
+
+5) Wait for some wind (to get some turbulence)
+
+6) Dial up P to fight turbulence better. In ANGLE mode I+FF will keep aircraft nice and level, but P will improve turbulence handling. WARNING - increasing P will cause much more active servos and reduce their life expectancy.
+
+### OSD setup
+I prefer using MW-OSD. It supports many protocols and also has native support of iNAV. Say you have a minimOSD or micro minimOSD. So first you need to upload [MWOSD](http://www.mwosd.com/) firmware to your minimOSD. You can find pretty straight forward install guide following the [link](https://github.com/ShikOfTheRa/scarab-osd/blob/master/OTHER/DOCUMENTATION/FirmwareFlashing.md). As usual you use Arduino IDE for global OSD config. All changes are done in the Config.h file. In our case we need to leave uncommented the following lines:
+
+OSD HARDWARE settings:
+
+`#define MINIMOSD`
+
+CONTROLLER SOFTWARE
+
+`#define iNAV`
+
+AIRCRAFT/INSTALLATION TYPE settings
+
+`#define FIXEDWING`
+
+TELEMETRY LTM settings
+
+`#define FORCE_MSP` // Uncomment to enable use of MSP as well as telemetry. Uses more memory
+
+`#define PROTOCOL_LTM` // To use LTM protocol instead of MSP
+
+`#define BAUDRATE 9600`
+
+
+Usualy it is enough.
+
+You may enable also rather helpful `#define MAPMODE` under FEATURES that allows you to see the map indication of relative positions of home and aircraft.
+
+Configure config.h allowing LTM if you want to share USART1 with your telemetry system, as explained above.
+
+All other settings are done in MWOSD configurator. Everything you need is to select the font you like, OSD indicators' positions. As iNAV takes care of voltage/current/rssi monitoring you'll need to ask the MWOSD to take these values from the FC (see the fig)
+
+The screenshot of the MWOSD configuration is shown below:
+
+
+Watch this demo video of the iNAV flight and RTH function:
+
+[](https://www.youtube.com/watch?v=GYd7mxGxNL8)
+
+Good luck!
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/quickstart/Howto:-CC3D-flight-controller,-minimOSD-,-telemetry-and-GPS-for-fixed-wing.md b/versioned_docs/version-4.1.0/quickstart/Howto:-CC3D-flight-controller,-minimOSD-,-telemetry-and-GPS-for-fixed-wing.md
new file mode 100644
index 0000000..1a58773
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/Howto:-CC3D-flight-controller,-minimOSD-,-telemetry-and-GPS-for-fixed-wing.md
@@ -0,0 +1,235 @@
+---
+title: CC3D For Fixed Wing 1
+---
+
+## Index
+1. Features
+
+2. What is needed
+
+3. Flashing iNAV firmware to CC3D.
+
+4. Basic settings
+
+Flight controller orientation.
+
+Port settings
+
+Configuration
+
+Failsafe
+
+Transmitter setup
+
+Motors
+
+Servo setup
+
+Recommended power layout
+
+OSD setup
+
+
+
+## 1. Features
+- Stabilization (Angle, Horizon modes)
+- RTH (baro and mag are not needed for fixed wing)
+- Waypoint missions (with EZGUI android apk).
+- Battery monitoring
+- RSSI monitoring
+- Failsafe
+- Telemetry
+- etc
+
+## 2. What is needed
+- Flight controller (one from the list, this guide shows how to setup CC3D)
+- OSD (minimOSD or any other that supports Cleanflight)
+- RX with telemetry support (just in case you want also telemetry). And a telemetry capable ground system.
+- GPS receiver (any that supports at least 5Hz update)
+- FPV hardware, airframe, RC
+
+## 3. Flashing iNAV firmware to CC3D.
+First you need to download a precompiled firmware for the board [here](https://github.com/iNavFlight/inav/releases). Select one of the releases precompiled for CC3D:
+- _inav_x.x.x_CC3D.hex_ for PWM receiver
+- _inav_x.x.x_CC3D_PPM1.hex_ for PPM receiver
+
+Next, you can check [numerous guides](https://www.youtube.com/watch?v=eClp-YBeSms&t=0s) how to flash CC3D with third party firmware (Attention, you'll need a FTDI adapter for the purpose). Of course you need to specify the previously downloaded firmware for the flashing. For now, if you have servos, it is not advisable to flash with them attached, because there is high frequency sent with default configuration, and you can burn them (the way -for now- is flash, configure plane and then attach servos).
+
+## 4. Basic settings
+
+### Port settings
+It is done using Ports tab .
+
+- UART1 - leave default value. You'll connect here either OSD or FTDI to setup the FC. If you want telemetry select it in Inav configurator, so you can have telemetry when the aircraft is armed. In this case, your OSD should be capable to read LTM, in order to mantain working OSD and telemetry at the same time. You have to connect the TX line from CC3D to both OSD and RX telemetry capable receiver (as openlrsng systems). MWOSD can read both MSP and LTM telemetry.
+- UART3 - for GPS. Switch on the option and select the correct port speed (38400 or 57600). Please pay attention that when using a ublox GPS receiver family 6-8 you don't need to make any configurations in the u-center. The flight controller under iNAV will do everything what is needed.
+
+### Configuration
+On the Configuration tab in the Mixer group select the Airplane or Flying Wing depending on the airframe you are using.
+
+Do not pay attention on the servo numbering! It will be described later.
+Now you need to make the accelerometer calibration. It is mandatory to fulfill it and it is better to do it before installing the FC into airframe. Please follow the [instructions](https://github.com/iNavFlight/inav/wiki/Sensor-calibration) to perform the 6 point accelerometer calibration.
+
+### Flight controller orientation.
+After the calibration is done you may select the sutable board orientation
+
+If you need to install your FC board into airplane such a way that the forward arrow points to some other direction, you need to change the FC orientation. This can be done or in the iNAV GUI or from CLI. I prefer doing it from GUI. Follow the Configuration tab and Board and sensor Alignment. If you want to mount the CC3D flight controller with USB plug to the left you need to set the Yaw Degrees parameter to 90. If you are going to mount the FC with USB plug facing right, then the Yaw Degrees = 270, etc.
+
+Now you are ready to connect your hardware according to the schemes:
+
+Parallel PWM Receiver ([click here](http://s8.hostingkartinok.com/uploads/images/2016/02/a47fb019c7783371053239a3d23a8d46.jpg) to see the real hardware photo)
+
+
+
+PPM Receiver
+
+
+
+Of course, according to the receiver used you need to use the aproppriate firmware for CC3D - inav_1.6.0_CC3D.hex for parallel PWM or inav_1.6.0_CC3D_PPM1.hex PPM receiver. For more information about CC3D pinout check the [CC3D](https://github.com/iNavFlight/inav/blob/master/docs/Board%20-%20CC3D.md) page
+
+I usually don't like the motor rotation on arm, so I switch on the "Don't spin motors when armed" feature.
+
+The new iNAV firmware has all PWM outputs disable until you switch on the "Enable motor and servo output"
+
+Switch on the GPS feature, and select the protocol.
+
+
+If your GPS receiver have enough satellites visible you'll be able to check the 3D fix in GPS tab
+![3D fix] (http://s8.hostingkartinok.com/uploads/images/2017/02/2db676b5f03d436480919b1cbc945fb5.png)
+
+By default iNav won't arm without GPS fix if the GPS feature is ON. To disable it use CLI: "set nav_extra_arming_safety = OFF". And it is highly recomended to switch it back ON before real flights.
+
+If your receiver connection is other than Parallel PWM Receiver, then you'll be able to setup battery voltage, current, RSSI monitoring. It is very userful. So IMHO a PPM is a must for CC3D FC.
+
+On the Receiver tab set up the channel order and their correspondence to TX sticks movements.
+
+On the Modes tab set up the flight modes according to the position of the AUX channels. For example, if you have a 3pos switch for the AUX1 you can get at minimum the following:
+
+* minimum channel value - do not select any mode - only gyros will work. The hand launch take off in this mode is excellent.
+* middle value - Angle or Horizon.
+* maximum value - RTH. Automatic return home.
+
+
+
+### Failsafe
+
+Check [this link](https://github.com/iNavFlight/inav/wiki/Failsafe) for RTH failsafe
+
+Starting from iNav 1.6 the Filesafe feature is very transparent and clear. For the failsafe to work you'll need:
+* Setup the receiver output no signal when your TX is off
+* OR assign the Failsafe mode to one of the channels and force it to trigger when your TX is off
+
+Set the desired Failsafe behavior. I prefer RTH.
+
+
+###Telemetry
+
+Connect your TX line and configure FC as explained above. Nowadays you can use several telemetry systems as [mwptools](https://github.com/stronnag/mwptools), [EZGUI](http://ez-gui.com/), [LTM Telemetry OLED](https://github.com/sppnk/LTM-Telemetry-OLED) and possibly others. The USART port can be shared with a OSD or used only for one of both features. For example, you can fly FPV w/o telemetry (just in your googles) or fly thermal soaring 3rd view w/o OSD. Or have both. Amazing you can do this with a simple cc3d, isnt it?.
+
+###Transmitter setup
+
+You should adjust (normal or reverse) on your transmitter so sticks correspond to below:
+
+In reciever tab:
+* Throttle stick push away - increased value
+* Yaw (Rudder) stick right - increased value
+* Pitch (Elevator) stick push away - increased value
+* Roll (Ailerons) stick right - increased value
+
+Also use subtrim to get center value of 1500us and use travel adjustment to get at lowest value 1000us and highest 2000us when moving sticks.
+
+
+### Motors
+
+After this follow to the Motors tab, rock your plane and notice what levels are moving depending on PITCH, ROLL and YAW angles. You can remember it or write it down. ROLL - 4,5; PITCH - 3, YAW - 6.
+
+
+
+Turn on your transmitter, switch to the Angle or Horizon flight mode and follow the Servos tab.
+
+### Servo setup
+
+
+
+Here you need to be very attentive. In this tab you set up endpoints, neutral, rates and reverse for stabilization modes. Servo numbering in the tab starts from 0!
+
+For the Elevator, tilt the plane's tail down, and the Elevator should go down. If the elevator goes up, then you need to set the Rate (the right-most drop down list) Servo 2 with negative sign.
+
+Tilt the left wing down. Left Aileron should go down and right one should go up. If it is not so, then put negative Rate values for Servo 3 and Servo 4 (if your ailerons are connected by means of Y-cable, than you can change the settings for only one Servo or connect the Y-cable to other Servo out).
+
+Turn the tail to the left, and the Rudder should go to the left. Otherwise switch the Servo 5 Rate to negative.
+
+After this stick movement should also move servos the correct way. (General rules: Elevator stick down - elevator goes up, Aileron stick to the left - left aileron is up, right aileron is down, Rudder stick to the left, rudder goes to the left)
+
+Attention! all the endpoints, neutrals, trimmers should be done on this tab, not in transmitter!
+
+### Recommended power layout
+
+To prevent brownout its wise to power servos with one BEC and the flight controller + other equipment with another BEC.
+
+This is one way to accomplish it:
+
+Glued a new row of pins onto the case of the flightcontroller, the must be connected together. (See the bottom of pins)
+
+All servos and ESC is connected to flightcontroller, except positive wire which goes to the new row. (This line gets its power from the BEC in the ESC)
+
+Another external BEC is connected at random positive and negativ pin on flight controller to power it, the receiver and GPS.
+
+This way if one servo get stuck and draws alot of amps you shouldnt risk your flight system to power down.
+
+
+
+
+### PID/PIFF Settings
+The default PID settings that are set using Presets tab are a good starting point but usually you may need to chnge them if you want yor plane to fly really stable.
+Here are my PIFF settings for a small 800mm flying wing - EPP Rainbow.
+
+
+DigitalEntity wrote about the PIFF controller setup procedure the following, I have nothing to add:
+
+If you have inflight adjustments - this will be easier for you. I tuned like this:
+
+0) Fly ANGLE mode, LOS, calm day. Started with these PIFFs: P=5, I=10, D/FF = 20
+
+1) Give hard roll command, watch how plane executes it. It should be smooth from start to finish, without (or with minimal) oscillation at the end of the roll, without much wobble. If it oscillates at the end of maneuver - reduce FF; if it starts fast, then slows down and after a moment pushes it further - that's indication of too low FF
+
+2) Repeat for pitch
+
+3) I dialed up FF as much as possible until I started to get oscillations at the end of maneuver and backed about 20%
+
+4) If it doesn't reach commanded angle - increase I-gain (best verifiable with OSD indication for roll/pitch angles
+
+5) Wait for some wind (to get some turbulence)
+
+6) Dial up P to fight turbulence better. In ANGLE mode I+FF will keep aircraft nice and level, but P will improve turbulence handling. WARNING - increasing P will cause much more active servos and reduce their life expectancy.
+
+### OSD setup
+I prefer using MW-OSD. It supports many protocols and also has native support of iNAV. Say you have a minimOSD or micro minimOSD. So first you need to upload [MWOSD](http://www.mwosd.com/) firmware to your minimOSD. You can find pretty straight forward install guide following the [link](https://github.com/ShikOfTheRa/scarab-osd/blob/master/OTHER/DOCUMENTATION/FirmwareFlashing.md). As usual you use Arduino IDE for global OSD config. All changes are done in the Config.h file. In our case we need to leave uncommented the following lines:
+
+OSD HARDWARE settings:
+
+`#define MINIMOSD`
+
+CONTROLLER SOFTWARE
+
+`#define iNAV`
+
+AIRCRAFT/INSTALLATION TYPE settings
+
+`#define FIXEDWING`
+
+Usualy it is enough.
+
+You may enable also rather helpful '#define MAPMODE' under FEATURES that allows you to see the map indication of relative positions of home and aircraft.
+
+Configure config.h allowing LTM if you want to share USART1 with your telemetry system, as explained above.
+
+All other settings are done in MWOSD configurator. Everything you need is to select the font you like, OSD indicators' positions. As iNAV takes care of voltage/current/rssi monitoring you'll need to ask the MWOSD to take these values from the FC (see the fig)
+
+The screenshot of the MWOSD configuration is shown below:
+
+
+Watch this demo video of the iNAV flight and RTH function:
+
+[](https://www.youtube.com/watch?v=GYd7mxGxNL8)
+
+Good luck!
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/quickstart/Multirotor-guide.md b/versioned_docs/version-4.1.0/quickstart/Multirotor-guide.md
new file mode 100644
index 0000000..6de39e9
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/Multirotor-guide.md
@@ -0,0 +1,49 @@
+---
+title: Multirotor Guide
+sidebar_position: 3
+---
+
+## 0. Setup hardware
+
+* Balance props and motors, install FC on a vibration-damping mount if possible.
+
+## 1. Getting your flight controller ready.
+
+* Download latest configurator from [here](https://github.com/iNavFlight/inav-configurator/releases)
+* Flash newest iNav with full chip erase option selected
+* Do the advanced 6-point [sensor calibration](./Sensor-calibration.md)
+* Select your Mixer. Most common ones are already available as presets. For exotic setups, see [Custom mixes for exotic setups](../advanced/Custom-mixes-for-exotic-setups.md); if you don't do this, you will not see any motors in the motors tab.
+* Be sure the model moves on the configurator as it is moving on the bench. If not, adjust board alignment from the Configuration tab
+* If you have a magnetometer, you may need to attach a battery for magnetometer calibration. Rotate the quadcopter 360 degrees on all 3 axes.
+
+## 2. Configure your TX
+
+No special mixers have to be applied on the TX. Just bypass all the channels as they are to the FC.
+Set trim on your TX to zero. Use subtrim to adjust your TX midpoints to be precisely 1500 when Roll/Pitch/Yaw sticks are centered. You can check the input values in the Receiver tab in iNav configurator. All values should be in the range 1000-2000uS.
+
+## 3. Tune your copter's Pitch/Roll/Yaw/Level PIDs and other values
+
+Many presets are available on the specific configurator tab and they mostly represent a good starting point.
+Be sure to load the correct present and double check the applied configuration.
+
+[Default values for different type of aircrafts](./Default-values-for-different-type-of-aircrafts.md)
+
+## 4. Trim copter to level flight
+DO NOT USE TRIM on your Transmitter to stop your copter drifting. Use board alignment settings or accelerometer trim stick combos.
+You can use RX stick combination to trim the quadcopter: [Controls](https://github.com/iNavFlight/inav/blob/master/docs/Controls.md)
+
+## 5. Check your sensors
+* If any, be sure the baro readings are correct and be sure the barometer is shielded with some foam to avoid to be disturbed by the air pushed on it by the propellers.
+* If a magnetometer is in use, be sure to check it is providing the correct heading information. After having calibrated it (outside, far away from buildings and parking lots) be sure that when you point the multirotor nose to the north the heading is 0 and it still is around 0 even if you tilt the multirotor a bit on pitch and roll axis. Be also sure that the magnetometer is placed reasonably away from interference sources (such as power wires).
+Having a good compass reading is **crucial** for navigation function to work correctly.
+
+## 6. Setup and verify failsafe on TX and iNav
+[Guide for setting up failsafe](../features/Failsafe.md)
+
+## 7. Determine and set hover throttle
+To let the altitude hold controller work correctly, you need to input your hover throttle (the throttle you need to apply to make the multirotor hover) into the **nav_mc_hover_thr** CLI variable or just set it via the configurator configuration tab.
+If your copter jumps/rises when you activate altitude hold, reduce your nav_mc_hover_thr a bit. If your copter falls, increase it a bit; fine tune until there is no jump or fall when activating altitude hold.
+
+
+## 8. Get to know the CLI values.
+iNav offers a lot of customization through CLI variables. It is strongly recommended to read through [iNav CLI variables](../advanced/iNav-CLI-variables.md) and [available CLI variables](https://github.com/iNavFlight/inav/blob/master/docs/Cli.md)
diff --git a/versioned_docs/version-4.1.0/quickstart/Sensor-calibration.md b/versioned_docs/version-4.1.0/quickstart/Sensor-calibration.md
new file mode 100644
index 0000000..8bf1660
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/Sensor-calibration.md
@@ -0,0 +1,97 @@
+---
+title: Sensor Calibration
+---
+
+**Important:** iNav requires you to follow the accelerometer calibration steps below. These steps are different to Cleanflight & Betaflight. So don't skip reading this section, **it's vitally important**.
+
+Modern accelerometer sensors are precise, but they require calibration if we want accurate measurements.
+
+The sensors on your flight controller might be biased and gains on different axes might be different. iNav uses an advanced 6-point calibration to take care of all irregularities your flight controller sensors might have.
+
+## Accelerometer calibration steps
+
+Unlike the simple level calibration used in cleanflight & betaflight INAV uses a "6 point accelerometer calibration" process.
+
+You may find this easier to do more accurately prior to installing the flight controller in your model and this procedure MUST be done referenced to the marked orientation on the board.
+
+See "calibration procedure" below:
+
+**Note:** If the flight controller is mounted in another angle or upside down, do the calibration steps with the flight controller pointing as shown in the pictures, not based on the orientation of the quad or fixed wing model itself, otherwise calibration won´t work.
+
+0. Connect the model to the "Configurator" software, select the "Setup" tab.
+
+1. Place the model level (_position 1 as shown in the picture_) and press the "Calibrate Accelerometer" button. Advanced calibration has been activated and has recorded the first data point.
+
+2. Place model on all sides in sequence (_positions 2 to 6_): on its back, right side, nose up, left side, nose down. Press "Calibrate Accelerometer" button for in each position. The advanced calibration algorithm will record 2nd to 6th data points.
+
+3. After all 6 positions have been recorded advanced calibration will calculate offsets and gains, then store them in the flight controllers EEPROM. Accelerometer calibration complete (YAY!).
+
+4. Use the CLI tab to verify that **accgain_x**, **accgain_y** and **accgain_z** parameters are **NOT 4096**. If they are, algorithm failed to converge, calibration failed and needs to be repeated. In addition, **acczero_x**, **acczero_y**, **acczero_z**, should **not be 0** any more.
+
+There is no need to place the model perfectly aligned, the algorithm does not care about exact positions as long as they are close to 90 degree apart and copter is stationary in every position.
+
+## Board Orientation and Level Calibration
+
+If you have your board rotated in any way, change board alignment to match (_see the configuration tab in the iNav configurator_).
+
+You can verify the correct board orientation by banking your your aircraft left and right, forward and back and rotate left and right. In all examples the 3D model image in configurator **must** move accordingly.
+
+Accelerometer calibration **does not** record a leveled model.
+
+For level flight and navigation features to work you need to trim the firmware to level flight using "Board Alignment" on the "Configuration" tab. The readings should show close to 0.0 on all axis when the aircraft is laying flat.
+
+To trim out unleveled flight / drift using stick commands is really useful.
+
+**Note:** If using CLI to set up board alignment unlike Cleanflight firmware board alignment angles are set in degrees*10, so if you need to trim your board 1.5 degrees you should enter "15".
+
+## Compass Calibration
+
+Accurately setting up the compass is vital because it is the primary source of heading information.
+
+Without an accurate heading the drone will not move in the correct direction in autopilot modes (POSHOLD, RTH, Waypoint). This can lead to circling (aka “toilet-bowling”) or even fly-aways.
+
+The magnetometer (_basically a compass_) measures magnetic field strength so it should be placed a**way from any sources of magnetic interference** - power wires, ESCs, motors, beepers, metal parts of the frame, video transmitters, Llamas & so on...
+
+The best way is to place the compass on a mast along with GPS module. When an external compass is used remember to set correct "align_mag", see the [iNav CLI variables](https://github.com/iNavFlight/inav/blob/master/docs/Cli.md) for more information. Compass must be mounted parallel to f/c. If not please follow the guide in [setting-up-the-compass-alignment](./GPS--and-Compass-setup.md#setting-up-the-compass-alignment).
+
+When using an external magnetometer 9/10 times you need to physically remove (_remove chip from board or cut a trace_) the internal one if you have on.
+
+You can't use two identical chips/magnetometers on the same I2C bus. The 1/10 time you dont need to physically remove your internal mag is when you have different magnetometers on the flight controller and the external one. Example you cannot use two HMC5883L magnetometers.
+
+### Performing the Calibration
+
+Calibrate with flight battery powering up the aircraft.
+
+Press "Calibrate Magnetometer" button.
+
+You have 30 seconds to hold the copter in the air and rotate it so that each side (front, back, left, right, top and bottom) points down towards the earth. However the algorithm is smart enough to calculate the proper calibration values even if you simply wave the copter in the air for 30 seconds after pressing "Calibrate Magnetometer" button.
+
+### Compass calibration using stick functions
+Calibrating Mag/Compass without the need to be connected to a computer can extremely convenient while out in the field. The [Controls.md](https://github.com/iNavFlight/inav/blob/master/docs/Controls.md) wiki describes the various capabilities of adjusting the craft's controls using the TX sticks. As described in this document, calibrate the compass by moving the left stick up and to the right while at the same time, move the right stick down and to the center. The flight controller will sound two quick beeps indicating the start of the calibration. Move the craft as indicated in the paragraph above. After 30 seconds, the flight controller will sound a single beep indicating the completion of the process.
+
+### Verifying that compass is calibrated properly
+
+0. Use the CLI to verify that **magzero_x**, **magzero_y** and **magzero_z** parameters are **NOT 0** any more. If they are, algorithm failed to converge, calibration failed and needs to be repeated.
+1. Connect the copter to iNAV Configurator and observe the attitude values on the "Setup" screen (values of Heading, Pitch and Roll). Point your models nose North and verify that heading is reading 0 deg. Tilt the copter 30 degrees forward, right, left and back while observing the Heading value. Value of 0 deg shouldn't change more than several degrees. Repeat the process with models nose pointing East (heading=90 deg), South (heading=180 deg), West (heading=270 deg).
+
+If the value is incorrect when copter is level, you likely don't have **align_mag** CLI variable set to proper compass alignment value. If heading value is correct when copter is level but drifts when you tilt the model, then your should re-calibrate the compass.
+
+2. Also, remember to set magnetic declination to a proper value on the "Configuration" screen.
+The magnetic declination of your specific location can be found here: (magnetic-declination.com)[http://magnetic-declination.com].
+
+If your magnetic declination readings are e.g. +3° 34' , the value entered in the iNav configurator is 3.34 (_3,34 in some locales_). In the CLI, the same effect would be `set mag_declination = 334`. For west declination, use a minus value, e.g. for 1° 32' W, `set mag_declination = -132`. In all cases (both CLI and GUI), the least significant digits are **minutes**, not decimal degrees.
+
+Since iNav 1.2, on non-F1 targets, one can use an automatic declination setting, which is more than accurate enough for iNav. `set inav_auto_mag_decl = ON`.
+
+
+## Gyroscope Calibration
+
+Gyroscope calibration, or rather bias recording, is performed on every startup. **Your model should be stationary while powering up. **
+
+With most models, connecting batteries while keeping the craft still can be difficult, simply ensure the craft is placed on the ground (or somewhere solid and still) for 5 seconds as soon as possible after powering up. Gyro auto calibration will only run when no motion is detected
+
+**Note:** Under normal conditions there is no need for a manual calibration procedure, but if required this can be performed via stick commands.
+
+## Backup and Restore the Settings
+
+To avoid going through full calibration after resetting the configuration new CLI settings are introduced to get and set accelerometer offsets and gains: **acczero_x**, **acczero_y**, **acczero_z**, **accgain_x**, **accgain_y**, **accgain_z**. The same applies to **magzero_x**, **magzero_y** and **magzero_z**.
diff --git a/versioned_docs/version-4.1.0/quickstart/Something-is-disabled----Reasons.md b/versioned_docs/version-4.1.0/quickstart/Something-is-disabled----Reasons.md
new file mode 100644
index 0000000..a5c4da3
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/Something-is-disabled----Reasons.md
@@ -0,0 +1,105 @@
+---
+title: Something is disabled
+---
+
+## Something is disabled
+
+iNav may fail to perform some action as expected, typically arming or engaging waypoints. This articles documents the reasons for some of these events.
+
+## Arming disabled reasons
+
+iNav will refuse to arm for the following reasons (e.g. from cli `status`):
+
+| Reason (CLI Mnemonic) | Bit Mask (Hex) | Explanation |
+| ------ | ----- | ----------- |
+| `FS` | `00000080` | The RX is not recognised as providing a valid signal |
+| `ANGLE` | `00000100` | The vehicle is not level as defined by the CLI `small_angle` setting |
+| `CAL` | `00000200` | The pre-arm sensor calibration has not completed. The barometer is somewhat susceptible to lengthy calibration, which may be mitigated by the CLI setting `baro_cal_tolerance`, e.g. `set baro_cal_tolerance = 500` (find a suitable value by experimentation). |
+| `OVRLD` | `00000400` | The CPU load is excessive. May be caused by too an aggressive loop time setting. |
+| `NAV` | `00000800` | Where the CLI setting `nav_extra_arming_safety = ON` is used, this may be caused by reasons shown in the [table below](#navigation-unsafe-reasons) |
+| `COMPASS` | `00001000` | The compass is not calibrated. Perform the calibration procedure |
+| `ACC` | `00002000` | The accelerometer is not calibrated. Perform the 6 point calibration procedure |
+| `ARMSW` | `00004000` | The arm switch was engaged as the FC booted |
+| `HWFAIL` | `00008000`| A required hardware device has failed / is not recognised (e.g. GPS, Compass, Baro) |
+| `BOXFS` | `00010000` | A failsafe switch is engaged |
+| `KILLSW` | `00020000` | A kill switch is engaged |
+| `RX` | `00040000` | The RC link is not detected (RX not detected) |
+| `THR` | `00080000` | The throttle setting is not a minimum |
+| `CLI` | `00100000` | The CLI is active (note: you will always /unavoidably see this when in the CLI) |
+| `CMS` | `00200000` | The CMS menu is active |
+| `OSD` | `00400000` | The OSD menu is active |
+| `ROLL/PITCH` | `00800000` | Roll and/or pitch is not centred |
+| `AUTOTRIM` | `01000000` | Servo autotrim is engaged |
+| `OOM ` | `02000000` | The FC is out of memory |
+| `SETTINGFAIL` | `04000000` | A CLI setting is out of range. The erroneous setting should be indicated in a CLI `dump`. If you can't then reset the offending setting, reflash with full chip erase and reapplying settings from scratch may help.|
+| `PWMOUT` | `08000000` | PWM output error. Motor or servo output initialisation failed. |
+| `NOPREARM` | `10000000` | PREARM is enabled and timed out |
+| `DSHOTBEEPER` | `20000000` | DSHOTBEEPER is enabled and is active |
+
+Note: On older processors, just the bitmask is shown, which can be decoded by the numeric values in the table. A numeric value may be a combination of conditions, for example:
+
+```
+0x184000 = 00100000 + 00080000 + 00004000 (CLI active, throttle not at minimum, arm engaged)
+```
+The values are correct for iNav 4.0.0 as of 2021-12.
+
+### Navigation Unsafe reasons
+
+Requires that a navigation mode (which includes failsafe RTH) is configured
+
+| Navigation Unsafe |
+| ------------------ |
+| The GPS has insufficient satellites (this is checked even if you disable GPS, but have a NAV mode configured in Modes tab) |
+| A navigation switch is engaged (e.g.PH, WP, RTH) |
+| First WP distance exceeded |
+| Satellite quality is unacceptable: EPH/EPV > 10m (note the limit in the CLI `inav_max_eph_epv` is in cm, default 1000) |
+| The WP mission contains an invalid JUMP sequence |
+| The first waypoint is beyond the distance defined by the CLI setting `nav_wp_safe_distance`. |
+
+* `nav_wp_safe_distance` : The default is 100m (10000cm, as the value is entered in cm), 0 disables this check.
+
+ ```
+ # get nav_wp_safe_distance
+ nav_wp_safe_distance = 10000
+ Allowed range: 0 - 65000
+ ```
+* Invalid JUMP.
+ - First item can't be JUMP (can't calculate 1st WP distance, impossible for backward jumps)
+ - Can't jump to immediately adjacent WPs (pointless)
+ - Can't jump beyond WP list (undefined behaviour)
+ - Can only jump to geo-referenced WPs (otherwise, undefined behaviour)
+
+## Waypoints will not execute
+
+The pilot *thinks* that they have loaded a waypoint mission, but the mission will not execute when the assigned switch is engaged.
+
+* No mission is actually loaded into the FC. Note that waypints have to be in volatile memory (that is cleared on powercycle), not in EEPROM. If waypoints have been saved to EEPROM it is necessary to restore the WPs to volatile memory before the mission can be executed.
+
+* The Fixed Wing aircraft is in `MANUAL` / `PASSTHROUGH` mode.
+
+* The craft is currently executing RTH
+
+## RTH fails to engage
+
+* The GPS signal is degraded (eph / epv exceed, CLI setting `inav_max_eph_epv`)
+
+## Diagnostics
+
+Diagnosing arming failure and WP execution failure often requires the use of a tool external to the FC; the following may help:
+
+* The iNav configurator displays reasons for arming failure
+* A blackbox log provides post event diagnostics
+* The iNav CLI (available from a terminal, the configurator and many ground-stations) displays arming disabled reasons:
+
+ ```
+ # status
+ ...
+ Arming disabled flags: NAV HWFAIL RX CLI
+ ```
+* A ground station may provide diagnostics, for example [mwp](https://github.com/stronnag/mwptools) provides an 'Arming Disabled' alert icon with 'popover' description / explanation, mission upload validation checks and 'first WP distance' exceeded warnings.
+* Video explanation via https://quadmeup.com/troubleshooting-inav-why-inav-is-not-arming/
+* **Your favourite diagnostic tool / technique goes here**
+
+## Postscript
+
+For 'Navigation is unsafe', you may, of course `set nav_extra_arming_safety = ALLOW_BYPASS`; however there is a clue is in the name. There is also `nav_extra_arming_safety = OFF`, which is not recommended. At least with `ALLOW_BYPASS` you know you've done something potentially dangerous.
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/quickstart/TROUBLESHOOTING.md b/versioned_docs/version-4.1.0/quickstart/TROUBLESHOOTING.md
new file mode 100644
index 0000000..c8a88fc
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/TROUBLESHOOTING.md
@@ -0,0 +1,24 @@
+---
+title: Troubleshooting
+---
+
+## UAV won't arm
+1. Verify that it is level. You can bypass this requirement by typing "set Small_angle=180" then "save" in the CLI.
+2. Run-time calibration not completed. Put the UAV flat and immobile on a surface and wait 10 seconds.
+3. GPS doesn't have a lock. Move to an area with no sky obstruction or interference and wait. If lock still doesn't happen after a minute, relocate your GPS far from on-board electrics or shield the bottom part with [copper tape](https://www.ebay.com/itm/Copper-Foil-Tape-2-X-10ft-EMI-Conductive-Adhesive-Ship-from-USA/152118807659?hash=item236afccc6b:g:q2IAAOSwpdpVaIrt:rk:3:pf:0).
+4. Compass not calibrated. Start compass calibration from configurator or stick control and, within 30 seconds, face all 6 face of the UAV to the ground.
+If none of the above work, verify in your goggles or CLI "status" command the cause. Hardware malfunction might be the cause.
+
+## UAV shakes
+1. Verify that frame & motors are solidly bolted together, on an H-frame double up the bottom plate.
+2. lower P on Roll and Pitch from configurator, adjustments or stick control
+3. drop PID to 1,1,1 for Pitch and Roll and do a PID tuning from scrartch https://youtu.be/4sjXJ5HoU_c or https://youtu.be/ehyXLsvaEhw
+
+## POS HOLD drifting
+(moving in circle a.k.a Toilet bowling or running away)
+1. SETTINGS: go inside configuration and verify that your MAG alignment is [set properly](https://github.com/iNavFlight/inav/wiki/GPS--and-Compass-setup)
+2. CALIBRATION: redo MAG calibration
+3. TEST MAG INSULATION: on the bench, add headings to OSD then props off, connect battery, motor tabs rev up your motors and see in your goggles if the headings changes. If it changes you have bad insulation so move the mag away from your quad's electricals or apply copper tape between mag and main power lines. If you want to test this with flight condition current, fly your quad outside in ACRO, doing punch-through with no yaw movement.
+
+## Transition to ALT HOLD is bad
+1. Get your UAV in a stable hover in ACRO or ANGLE mode, find the amount of throttle required (openTX>Output>Throttle number at the top). Dial this number in configurator>Advanced Tuning tab>Hover Throttle. Note: if the value you find is >1700, your motors are underpowered to lift your quad, consider different props and motor combination.
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/quickstart/Upgrading-from-an-older-version-of-INAV-to-the-current-version.md b/versioned_docs/version-4.1.0/quickstart/Upgrading-from-an-older-version-of-INAV-to-the-current-version.md
new file mode 100644
index 0000000..e0d47ca
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/Upgrading-from-an-older-version-of-INAV-to-the-current-version.md
@@ -0,0 +1,173 @@
+---
+title: Upgrading From An Older Version of INAV
+---
+
+
+
+This page is intended to make it easy for you to upgrade your INAV older version to the current INAV version. The process is straightforward as long as you follow the instructions detailed here.
+
+**The current version of INAV is 2.6** (as the time this document was been last updated).
+
+> Note that INAV version numbers has a pattern: There are three numbers separated by dots (2.6.0).
+> - The first number is the major version. This number changes only when BIG changes are made on INAV.
+> - The second number is the minor version. This number changes only when SMALL changes are made on INAV.
+> - The third number is the revision number. This number changes only when some bug is fixed on INAV and no new functionality is added.
+>
+> To determine the version, only the first two numbers are important.
+
+In general, all comes to the following steps:
+* Get the latest configurator.
+* Get the current settings from your flight controller board
+* Determine the current version and the TARGET of INAV firmware flashed to your flight controller board.
+* Check which values has changed over the newer versions, and adjust your settings as necessary
+* Flash the latest INAV firmware on your flight controller board
+* Paste the adjusted settings on the Command Line Interface (CLI)
+* Upload your preferred font to the OSD chip
+* Take additional upgrading actions (if needed)
+
+**Note about F1 and F3 microcontrollers**: Flight controller boards with STM32**F1** chips (like NAZE32 or CC3D) will only work up to the 1.7.3 version. Flight controller boards with STM32**F3** chips (like SPRACINGF3 or OMNIBUS) will only work up to the 2.6.0 version. We do recommend that you use a F4, F7 or H7 based Flight Controller board for new setups.
+
+## Get the latest INAV configurator
+
+Download and install (on your computer) the latest configurator at the [INAV Configurator Releases page](https://github.com/iNavFlight/inav-configurator/releases).
+
+## Get all the current settings from your flight controller board
+
+1. Open the configurator program on your computer.
+2. Connect the flight controller board to the USB port on PC, then click connect button on the configurator.
+3. Go to the CLI tab and type `diff all`. It should return a big text with all your settings.
+4. Copy this text and paste it on your favorite text editor (like Notepad), then save it as a backup.
+
+## Determine your current INAV firmware version and target
+
+On your settings file, just at the beginning, you should have something like this:
+
+```
+# version
+# INAV/MATEKF405 2.2.1 Jul 3 2019 / 22:31:06 (a6d847482)
+# GCC-8.2.1 20181213 (release) [gcc-8-branch revision 267074]
+```
+
+Take note of the TARGET which is just after the `INAV/` and VERSION number which is just after the target
+(In this case, TARGET is **MATEKF405** and VERSION is **2.2.1**)
+
+## Check which values has changed over the newer versions, and adjust as necessary
+
+Now it's time to change your settings file so it becomes compatible with the latest INAV firmware. Follow your specific version instructions.
+
+### From 2.5 to 2.6
+* If you are using Home Offset feature (lines with `nav_rth_home_offset_`), then you should remove this lines and use the `safehome` function instead.
+* If you are using Override Motor Stop feature (`nav_overrides_motor_stop` setting), you need to change the value of this setting by one of the new possible values, which are `OFF`, `AUTO_ONLY` or `ALL_NAV`.
+* Remove this deprecated settings if present: `gyro_notch1_hz`, `gyro_notch2_hz`, `gyro_notch1_cutoff`, `gyro_notch2_cutoff`, `use_dterm_fir_filter`, `dterm_setpoint_weight`, `dterm_notch_hz`, `dterm_notch_cutoff`, `mc_iterm_relax_type`
+
+### From 2.4 to 2.6
+* `aux` lines needs to be changed. Use [this tool](https://box2perm.vercel.app/) to migrate your `aux` lines.
+* Replace `yaw_motor_direction` by `motor_direction_inverted` if present
+* Replace `telemetry_uart_unidir` by `telemetry_halfduplex` if present
+* Remove this deprecated settings if present: `dyn_notch_width_percent`, `dyn_notch_range`, `dyn_notch_q`, `dyn_notch_min_hz`, `rpm_dterm_filter_enabled`, `dterm_gyro_harmonic`, `rpm_dterm_min_hz`, `rpm_dterm_q`, `vtx_freq`, `gyro_notch1_hz`, `gyro_notch2_hz`, `gyro_notch1_cutoff`, `gyro_notch2_cutoff`, `use_dterm_fir_filter`, `dterm_setpoint_weight`, `dterm_notch_hz`, `dterm_notch_cutoff`, `mc_iterm_relax_type`
+* If you are using Home Offset feature (lines with `nav_rth_home_offset_`), then you should remove this lines and use the `safehome` function instead.
+* If you are using Override Motor Stop feature (`nav_overrides_motor_stop` setting), you need to change the value of this setting by one of the new possible values, which are `OFF`, `AUTO_ONLY` or `ALL_NAV`.
+
+### From 2.2 or 2.3 to 2.6
+* Find `min_throttle` line, and replace it by `throttle_idle`, setting the percentage of the idle throttle. The default is 15.
+* `aux` lines needs to be changed. Use [this tool](https://box2perm.vercel.app/) to migrate your `aux` lines.
+* Replace `yaw_motor_direction` by `motor_direction_inverted` if present
+* Replace `telemetry_uart_unidir` by `telemetry_halfduplex` if present
+* Remove this deprecated settings if present: `dyn_notch_width_percent`, `dyn_notch_range`, `dyn_notch_q`, `dyn_notch_min_hz`, `rpm_dterm_filter_enabled`, `dterm_gyro_harmonic`, `rpm_dterm_min_hz`, `rpm_dterm_q`, `vtx_freq`, `gyro_notch1_hz`, `gyro_notch2_hz`, `gyro_notch1_cutoff`, `gyro_notch2_cutoff`, `use_dterm_fir_filter`, `dterm_setpoint_weight`, `dterm_notch_hz`, `dterm_notch_cutoff`, `mc_iterm_relax_type`
+
+### From 2.0 or 2.1 to 2.6
+* Find `min_throttle` line, and replace it by `throttle_idle`, setting the percentage of the idle throttle. The default is 15.
+* If you are upgrading a multi rotor, POS XY PID I and D have now specific settings, respectively `nav_mc_pos_deceleration_time` and `nav_mc_pos_expo` . So if you don't use defaults, when restoring, move yours to the new settings.
+* `aux` lines needs to be changed. Use [this tool](https://box2perm.vercel.app/) to migrate your `aux` lines.
+* Replace `yaw_motor_direction` by `motor_direction_inverted` if present
+* Replace `telemetry_uart_unidir` by `telemetry_halfduplex` if present
+* Remove this deprecated setting if present: `vtx_freq`, `gyro_notch1_hz`, `gyro_notch2_hz`, `gyro_notch1_cutoff`, `gyro_notch2_cutoff`, `use_dterm_fir_filter`, `dterm_setpoint_weight`, `dterm_notch_hz`, `dterm_notch_cutoff`, `mc_iterm_relax_type`
+
+### From 1.9 to 2.6
+* Find `min_throttle` line, and replace it by `throttle_idle`, setting the percentage of the idle throttle. The default is 15.
+* If you are upgrading a multi rotor, POS XY PID I and D have now specific settings, respectively `nav_mc_pos_deceleration_time` and `nav_mc_pos_expo` . So if you don't use defaults, when restoring, move yours to the new settings.
+* Delete all lines starting with: mixer acczero accgain magzero osd.
+* `aux` lines needs to be changed. Use [this tool](https://box2perm.vercel.app/) to migrate your `aux` lines.
+* Replace `yaw_motor_direction` by `motor_direction_inverted` if present
+* Replace `telemetry_uart_unidir` by `telemetry_halfduplex` if present
+* Remove this deprecated setting if present: `vtx_freq`
+
+### From 1.7 or 1.8 to 2.6
+* Find `min_throttle` line, and replace it by `throttle_idle`, setting the percentage of the idle throttle. The default is 15.
+* If you are upgrading a multi rotor, POS XY PID I and D have now specific settings, respectively `nav_mc_pos_deceleration_time` and `nav_mc_pos_expo` . So if you don't use defaults, when restoring, move yours to the new settings.
+* Delete all lines starting with: mixer acczero accgain magzero osd.
+* Find `vbat_scale`, `vbat_max_cell_voltage`, `vbat_warning_cell_voltage` and `vbat_min_cell_voltage` values on your settings, and multiply their values by 10.
+* `aux` lines needs to be changed. Use [this tool](https://box2perm.vercel.app/) to migrate your `aux` lines.
+* Replace `yaw_motor_direction` by `motor_direction_inverted` if present
+* Replace `telemetry_uart_unidir` by `telemetry_halfduplex` if present
+* Remove this deprecated setting if present: `vtx_freq`
+
+### From 1.6 to 2.6
+* Find `min_throttle` line, and replace it by `throttle_idle`, setting the percentage of the idle throttle. The default is 15.
+* If you are upgrading a multi rotor, POS XY PID I and D have now specific settings, respectively `nav_mc_pos_deceleration_time` and `nav_mc_pos_expo` . So if you don't use defaults, when restoring, move yours to the new settings.
+* Delete all lines starting with: mixer acczero accgain magzero osd.
+* Find `vbat_scale`, `vbat_max_cell_voltage`, `vbat_warning_cell_voltage` and `vbat_min_cell_voltage` values on your settings, and multiply their values by 10.
+* Find `mag_hold_rate_limit` and replace by `heading_hold_rate_limit` (renamed parameter).
+* Find `nav_max_speed` and replace by `nav_auto_speed` (renamed parameter).
+* Find `nav_max_climb_rate` and replace by `nav_auto_climb_rate` (renamed parameter).
+* Remove this deprecated settinsg if present: `vtx_freq`, `nav_fw_roll2pitch`
+* `aux` lines needs to be changed. Use [this tool](https://box2perm.vercel.app/) to migrate your `aux` lines.
+* Replace `yaw_motor_direction` by `motor_direction_inverted` if present
+* Replace `telemetry_uart_unidir` by `telemetry_halfduplex` if present
+* Find all lines starting with `servo`, and remove the fifth and the sixth arguments of the parameter.
+
+Example: `servo 3 1070 1950 1500 90 90 -80 -1`
+
+Will become: `servo 3 1070 1950 1500 -80 -1`
+
+### From 1.5 or earlier versions
+
+Your version is A LOT outdated. We really recommend you to set everything up from scratch. Your current settings will not be as much as useful. But don't worry, INAV became much easier to set up since this version.
+
+## Flash the lastest INAV firmware to your board
+Now it's time to flash the lastest INAV firmware to your flight controller board..
+* On INAV Configurator, go to the "Firmware Flasher" tab.
+* Select the proper TARGET of the flight controller board.
+* Make sure that the "Full Erase" option is ENABLED.
+* Click "Load Firmware (Online)" button, and then after it loads the online firmware, click "Flash Firmware" button.
+* Wait for the completion of the process.
+
+## Paste the adjusted settings on the CLI
+* Click the "Connect" button on INAV configurator.
+* Go to the CLI tab.
+* Copy all the settings text from your adjusted text file and paste on the CLI input text box, then press ENTER.
+* Wait for all the settings to be typed on the output text box.
+* If no errors occurred, Flight controller should save the settings and reboot by itself.
+
+## Upload your preferred font to the OSD chip
+The font file changes between versions! That's why you need to update the font stored on the OSD chip every time you upgrade INAV version in order to OSD work properly.
+* Go to the OSD Tab on the Configurator.
+* In the bottom right corner, there's a "Font" button. Click it.
+* Select the font that best pleases you, and then click "Upload" button.
+* Wait for the process to complete. Flight Controller will reboot automatically.
+
+## If you are upgrading from version 2.5 or earlier
+* If you have a compass, it has to be recalibrated!
+* Do not migrate Multirotor PID and filter settings from previous releases of INAV. Use Multirotor default preset (3"-7") instead and make required changes on top of that
+
+## If you are upgrading from version 1
+There was a big update from 1.9 to 2.0, there's a new mixer framework, a new OSD framework and new calibration scales for accelerometer and magnetometer. For that reason, you'll need to set this up again and the previous settings will not work.
+
+* Go to the Mixer tab and load and apply your desired mixer.
+* Calibrate the accelerometer following the steps in the dedicated tab. Only first two steps need to be made in the right order.
+* Calibration of the magnetometer should be done at the field. The magnetic field indoors can be distorted and led to a bad calibration.
+* Restore manually your OSD layout using the screenshot and upload the font you like using the dedicated button.
+
+## Check if everything is working as it should
+
+* Carefully check all the configuration and check on the bench without installed propellers if everything looks good. In particular, check if the model preview behaves correctly when you are moving your model and check surfaces movements for an airplane.
+* Arming with sticks command is not supported anymore, so if you were using sticks commands for arming, don't forget to add an arming switch in the Modes tab on the configurator.
+
+## Enjoy the lastest INAV version!
+
+If you done everything right, now your aircraft should be flying ok.
+
+INAV adds lots of new features at every new version! This guide helped you to make your aircraft fly with the newer version as good as it was flying before, but now it's time learn all the new tricks that INAV can do!
+Check [this page](../advanced/New-features-over-versions-log.md) to see everything that the newer versions of INAV can do!
+
+Enjoy!
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/quickstart/Welcome-to-INAV,-useful-links-and-products.md b/versioned_docs/version-4.1.0/quickstart/Welcome-to-INAV,-useful-links-and-products.md
new file mode 100644
index 0000000..f6af55b
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/Welcome-to-INAV,-useful-links-and-products.md
@@ -0,0 +1,82 @@
+---
+title: Useful Links and Products
+---
+
+
+
+**Hello everyone and welcome to INAV!**
+
+We hope you will enjoy spending time in the chat (https://t.me/INAVFlight) and the Facebook Group (https://www.facebook.com/groups/INAVOfficial), following the rules of a quiet life, and indeed flying your machines with INAV.
+
+Before asking for help, please check if you can find the solution for your issue here:
+
+1) https://github.com/iNavFlight/inav/wiki
+
+2) https://github.com/iNavFlight/inav/tree/master/docs
+
+Any contribution to the above documentation is, indeed, highly appreciated.
+
+If you find any issues in the flight controller code please feel free to open an issue on our GitHub issue tracker at https://github.com/iNavFlight/inav/issues, if you find an issue with the configurator software open an issue here https://github.com/iNavFlight/inav-configurator/issues
+
+**Going to build a copter or a plane that will run INAV?**
+
+You are very welcome to ask for suggestions and tips in the chat!
+
+Buying from the following links will help in supporting more hardware, debugging and fixing bugs and expanding the functionalities of the flight controller. From every purchase you make, without any additional cost for you, a small commission will be given to INAV developers!
+
+If you are building a **plane**:
+
+https://github.com/iNavFlight/inav/wiki/Fixed-Wing-Guide
+
+## Recommended hardware
+
+### Flight controllers
+* [Matek H743-SLIM](https://inavflight.com/shop/s/bg/1755036)
+* [Speedybee F7 V2](https://inavflight.com/shop/s/bg/1839168)
+* [Matek F722-SE](https://inavflight.com/shop/p/MATEKF722SE)
+* [Matek F765-WSE](https://inavflight.com/shop/s/bg/1890404)
+* [Matek F722-MiniSE](https://inavflight.com/shop/s/bg/1707404)
+
+### Airplane models
+* [AR Wing Pro](https://inavflight.com/shop/s/bg/1756841)
+* [AtomRC Dolphin](https://inavflight.com/shop/s/bg/1758430)
+* [SonicModell Binary](https://inavflight.com/shop/s/bg/1473014)
+* [Volantex Ranger 2000](https://inavflight.com/shop/s/bg/1151700)
+* [Mini AR Wing](https://inavflight.com/shop/s/bg/1341528)
+
+### Radios
+* [Radiomaster TX16S](https://inavflight.com/shop/s/bg/1746075)
+* [FrSky Q X7](https://inavflight.com/shop/s/bg/1196246)
+* [FlySky FS-i6X](https://inavflight.com/shop/s/bg/1090406)
+
+### Long range radio systems
+* [Radiomaster TX16S + TBS Crossfire Starter Set](https://inavflight.com/shop/s/bg/1735618)
+* [ImmersionsRC Ghost](https://inavflight.com/shop/s/bg/1722555)
+* [FrSky R9M 2019 + R9MX](https://inavflight.com/shop/s/bg/1707906)
+
+### GPS & Sensors
+* [Beitian BN180 GPS](https://inavflight.com/shop/p/BN180)
+* [Beitian BN880Q GPS+COMPASS](https://inavflight.com/shop/s/bg/1450469)
+* [Beitian BN880 GPS+COMPASS ](https://inavflight.com/shop/p/BN880)
+* [Matek M8Q-5883](https://inavflight.com/shop/s/bg/1337288)
+* [Matek Lidar+OpFlow board](https://inavflight.com/shop/s/bg/1604930)
+* [Matek Digital Airspeed Sensor](https://inavflight.com/shop/s/bg/1710131)
+* [Benewake TFmini Lidar](https://inavflight.com/shop/s/bg/1449740)
+
+
+### FPV
+* [DJI FPV Goggles](https://inavflight.com/shop/s/bg/1800745)
+* [Caddx Air Unit](https://inavflight.com/shop/s/bg/1546926)
+* [Caddx Vista HD](https://inavflight.com/shop/s/bg/1625165)
+* [Foxeer T-Rex FPV camera](https://inavflight.com/shop/s/bg/1756536)
+* [RunCam Eagle 3 FPV camera](https://inavflight.com/shop/s/bg/1723926)
+* [Eachine Cobra X FPV goggles](https://inavflight.com/shop/s/bg/1778518)
+* [Skyzone SKY04X FPV goggles](https://inavflight.com/shop/s/bg/1755006)
+
+### Other
+* [ViFly ShortSaver 2](https://inavflight.com/shop/s/bg/1788341)
+* [ViFly Finer buzzer](https://inavflight.com/shop/s/bg/1329066)
+
+You can get more suggestions following this [link](https://github.com/iNavFlight/inav/wiki/Welcome-to-INAV,-useful-links-and-products) too.
+
+_Thanks, and happy flying!_
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/quickstart/Why-do-I-have-limited-servo-throw-in-my-airplane.md b/versioned_docs/version-4.1.0/quickstart/Why-do-I-have-limited-servo-throw-in-my-airplane.md
new file mode 100644
index 0000000..4a18191
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/Why-do-I-have-limited-servo-throw-in-my-airplane.md
@@ -0,0 +1,50 @@
+---
+title: Why Do I Have Limited Servo Throws In My Airplane
+---
+
+## Explanation of why you have limited throw in any stabilisation mode. ( Including Rate / Acro )
+
+First basic PIFF controller:
+
+* P-gain will change your servo movement when it sees an error between wanted motion ( deg/s ) and actual motion ( deg/s )
+* I-gain will change your servo movement when it sees an error between wanted motion ( deg/s ) and actual motion ( deg/s ), however I-gain also knows the concept of time, and therefor will contuinue to increase servo movement until actual motion is the same as wanted motion.
+* FF-gain doesnt not care about actual motion, and does only move servos based on wanted motion.
+
+Also Angle mode itself have an P-gain to level the aircraft back to level.
+
+Also an sidenote is that I-gain is suppressed before takeoff and without throttle, EVEN with airmode enable you need to first have had some throttle to see the I-gain working, this is important to know if you want to "bench" test behavior.
+
+Passthrough bypasses all this an moves servos directly.
+
+In other words, the only thing that will limit passthrough servo limits and rates set up in the Servos tab.
+
+## What is stabilisation? And how do you as the pilot control the airplane in a stabilised mode?
+
+In passthrough everything is easy, you move sticks on radio, the FC does some mixing according to which airplane/flying wing you have, and then you move the servos directly.
+
+In stabiliation mode however you dont control the servos at **ALL**. Everything is controlled by actual motion, and wanted motion. When you move the sticks you are commanding motion, example 30deg/s roll.
+
+Then the P-gain will start working, the I-gain will start working and the FF-gain will start working, if tuned properly it will hit the wanted motion.
+
+So what does this have to do with limited servo throws?
+
+1. For actual testing on bench you will need to arm and apply throttle to see how much the servos actual moves in flight.
+
+2:
+
+An typical wing can example manage 500 deg/s, default rate values for INAV is 200deg/s.
+
+QUIZ: You command 100% right roll, which would be 200deg/s. What would happend if it did give you full servo throw?
+
+Yes, it would have hit 500deg/s instead and overshoot target motion.
+
+Sum up:
+
+You dont **need** full servo throw! It all depends how you want to [tune](../advanced/Tune-INAV-PIFF-controller-for-fixedwing.md) your airplane.
+
+IF you want full throw, your rate settings ( deg/s ) should match what your plane is able to do at full servo throw. Then in stabilitation mode you increase your P-gain or FF-gain untill you get full throw on servos.
+
+
+Sidenote: For older firmeware, If you want to calm your airplane in `passthrough` mode, you will need an programmable TX. Program it so when enabling `passthrough` on a switch, the switch also reduce channel range and adds expo.
+
+In modern firmware, with `manual` mode (which replaces `passthrough`), the FC imposes expo and rates.
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/quickstart/YouTube-video-guides.md b/versioned_docs/version-4.1.0/quickstart/YouTube-video-guides.md
new file mode 100644
index 0000000..a6c3294
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/YouTube-video-guides.md
@@ -0,0 +1,25 @@
+---
+title: Link to YouTube video guides.
+---
+
+# Link to YouTube video guides.
+
+* [INAV 3 from flash to flight for multirotor drones](https://youtube.com/playlist?list=PLOUQ8o2_nCLkfcKsWobDLtBNIBzwlwRC8)
+* [INAV Fixed Wing Tuning Guide](https://youtu.be/A45vc4OihgY)
+* [Painless360 iNav playlist](http://www.youtube.com/playlist?list=PLYsWjANuAm4qdXEGFSeUhOZ10-H8YTSnH)
+* [Setting up & Using iNav 2017 by Matthew Ogborne](https://youtu.be/1DCCjPbHl_I?list=PLgoM4-umzSqd0clW-e_A12yKiOpV--3a2)
+* [Backup and restoring](https://www.youtube.com/watch?v=M5haTMW239E&feature=youtu.be)
+* [How to use presets](https://www.youtube.com/watch?v=tOXe_VHxVLg)
+* [Gyroscope and filtering part 1](https://www.youtube.com/watch?v=Bv5ajMgdsno)
+* [Gyroscope and filtering part 2](https://www.youtube.com/watch?v=G_XxKeLL4-k)
+
+* [Gyroscope and filtering part 4](https://www.youtube.com/watch?v=0WTEbQ8hOx4)
+* [INAV Troubleshooting: why INAV is not arming](https://www.youtube.com/watch?v=7MAdgGkBkXs)
+* [INAV Troubleshooting: magnetometer is not working](https://www.youtube.com/watch?v=-zaIE-s8aHQ)
+* [INAV Troubleshooting: not getting full servo throw on flying wing](https://www.youtube.com/watch?v=o2RwTeBbvos)
+* [INAV Troubleshooting: toilet bowling instead of Position Hold](https://www.youtube.com/watch?v=FlEm0-pXNf0)
+* [How to use Autotune](https://youtu.be/UOGfC3pvbWM)
+* [How to use servo autotrim](https://www.youtube.com/watch?v=XW1esQp_RvU)
+* [The most common iNav mistakes](https://youtu.be/fVJYodLimD8)
+* [INAV setup for tracked vehicles](https://youtu.be/9194OzsHOFc)
+* [Betaflight to INAV migration in 22 minutes](https://youtu.be/1hhsqyXeKew)
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/quickstart/_category_.json b/versioned_docs/version-4.1.0/quickstart/_category_.json
new file mode 100644
index 0000000..d49165b
--- /dev/null
+++ b/versioned_docs/version-4.1.0/quickstart/_category_.json
@@ -0,0 +1,8 @@
+{
+ "label": "Quickstart",
+ "position": 2,
+ "link": {
+ "type": "generated-index",
+ "description": "Get quickly setup and flying with a basic configuration"
+ }
+ }
\ No newline at end of file
diff --git a/versioned_docs/version-4.1.0/welcome.md b/versioned_docs/version-4.1.0/welcome.md
new file mode 100644
index 0000000..b04ceb5
--- /dev/null
+++ b/versioned_docs/version-4.1.0/welcome.md
@@ -0,0 +1,20 @@
+---
+title: Welcome!
+sidebar_position: 1
+description: The INAV Docs
+slug: welcome
+---
+
+# Welcome to the Docs
+
+INAV is a flight controller software for a multitude of air and land vehicles such as multirotors, fixed wings, VTOLs, rovers, and submarines.
+The software suite consists of:
+* INAV Firmware - what's flashed on the flight controller
+* INAV Configurator - a graphical desktop tool that allows for configuring and programming the vehicle
+* INAV Lua Widget - an EdgeTX widget that augments the INAV experience
+* INAV Blackbox Tools - a tool to convert and use flight data recorded on the flight controller
+
+## Purpose
+
+This unofficial, community made website is the next evolution for the INAV project's documentation.
+The new documentation aims to consolidate everything INAV in a central and easy to use location.
diff --git a/versioned_sidebars/version-4.1.0-sidebars.json b/versioned_sidebars/version-4.1.0-sidebars.json
new file mode 100644
index 0000000..5f41a72
--- /dev/null
+++ b/versioned_sidebars/version-4.1.0-sidebars.json
@@ -0,0 +1,8 @@
+{
+ "documentationSidebar": [
+ {
+ "type": "autogenerated",
+ "dirName": "."
+ }
+ ]
+}
diff --git a/versions.json b/versions.json
index 0b7dacd..6d73a49 100644
--- a/versions.json
+++ b/versions.json
@@ -1,3 +1,4 @@
[
+ "4.1.0",
"4.0.0"
]